Download
1 / 23
230 likes | 248 Views
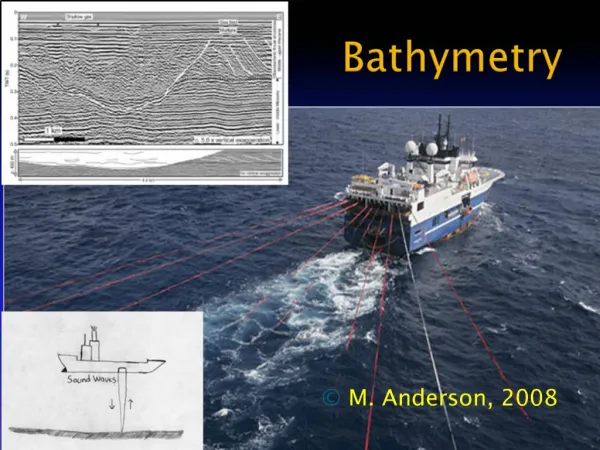
This paper discusses adaptive grids for bathymetry mapping and navigation, including off-line and on-line mapping, real-time optimally adapting meshes (ROAM), and characterizing uncertainty for navigation.

E N D
Adaptive Grids For Bathymetry Mapping And Navigation Michel Chedid and Maria-João Rendas I3S - MAUVE Nice, 17/18 December 2001
Outline • Problem formulation • Mapping • Off-line • On-line • Navigation • Real Time Optimally Adapting Meshes (ROAM) • Noiseless data • Noisy data • Dynamically expand the support • Conclusions and future work Nice, 17/18 December 2001
xi,yi di hi Problem Formulation • Mapping • Given a set of altitude measures hi taken by a robot at positions (xi,yi,di), iteratively build an efficient representation of the observed sea-bed surface • Problems : • large volume of data (off-line and on-line mapping) • noisy data (off-line and on-line mapping) • dynamic definition of the support S (on-line mapping) Nice, 17/18 December 2001
Off-line Mapping • Find an efficient representation of a given set of data points • useful for on-line use of an a priori known map (limited on-board memory) • fast post-mission visualisation on acquired data • Two distinct situations • noise-free data (existing maps) • noisy data (learned maps) Nice, 17/18 December 2001
On-line Mapping Recursive update of an internal representation (of reduced complexity) of a set of (noisy) data points New problem: the support set S is not known a priori (it depends on the robot trajectory) : the grid that supports the representation must be dynamically expanded. Nice, 17/18 December 2001
Navigation • Problem: • Given an internal map M, which contains uncertain information about the sea-bed depth over an area S, use the current robot’s measures to locate the robot in the map. Goal: reset large dead-reckoning errors, bound navigation errors. • Approaches: • two step procedures (association filtering) • non-linear filters (Gauss mixtures, particular filtering,...) • Requires: characterisation of the uncertainty associated to • the current estimates of the robot position (xi,yi,zi) • the uncertainty associated to the altitude measures, hi • the uncertainty associated to the map M at each point zM(x,y) Nice, 17/18 December 2001
ROAM Real Time Optimally Adapting Meshes • Algorithm originated in the Computer Graphics community for fast visualisation of 3D animated scenes. • Triangulation algorithm based on a regular square grid of size (2n+1)(2n+1), n = 0, 1, 2, … • that approximates a surface by a series of triangular facets. • The main advantages of the algorithm are • it adapts the resolution (size of the triangles) to the local characteristics of the surface (minimize the number of triangles that must be drawn) • on-board memory requirements • pointer structure that enables fast access to the individual triangles • real-time processing of the data Nice, 17/18 December 2001
Example (ROAM) Nice, 17/18 December 2001
RT5 RT4 LT6 RT7 LT1 First level RT1 LT7 RT6 RT1 LT4 LT5 LT1 Second level LT2 LT3 RT2 RT3 LT4 LT5 LT6 LT7 RT4 RT5 RT6 RT7 Third level Binary Triangle Tree (ROAM) Example: n = 1 Nice, 17/18 December 2001
Notation (ROAM) Notation for neighboring triangles: Right neighbor Left neighbor Triangle T Base neighbor Every node has six pointers. Nice, 17/18 December 2001
Splitting Splitting is done when a triangle is not a good enough approximation of the data. It increases the depth of the tree at that node. Constraint : splitting of some triangles forces split of other triangles to prevent discontinuities in the mesh Example: Nice, 17/18 December 2001
Merge Merge: The operation opposit to split where two smallertriangles are merged to build a bigger triangle (they represent irrelevant details). It corresponds to eliminating branches at the lowest tree level (the eliminated triangles are leaves). If a triangle and its base neighbor have been split once, they are said to form a mergeable diamond. Using split and merge operations any triangulation can be obtained from any other given triangulation. Nice, 17/18 December 2001
Error Metric ( ROAM ) What is an error metric (associated to the triangles)? Example : Geometric error metric eh At the leaf nodes: eh = 0 elsewhere in the tree: eh= max (eh,leftchild , eh,righchild ) + h h Nice, 17/18 December 2001
Algorithm (ROAM) The triangulation algorithm starts with the complete binary tree of highest depth, and proceeds in two steps: • Compute the error metric for the current tree (recursively from the tree leaves) • Repeat until no changes are made: • at every mergeable diamond • if(eh< threshold and eh,baseneighbor< threshold) • eliminate the children nodes Nice, 17/18 December 2001
ROAM for Mapping • Goal : • data compression ( memory limitations), • fast access to values (real-time processing) • Drawback: • the support of the representation is static, the algorithm needsto know all input data (over a complete regular grid) at once. Nice, 17/18 December 2001
ROAM for Off-line Mapping • For noise-free measures • Interpolate the data points over aregular grid (using, for instance, linearinterpolation). • Apply ROAM to obtaina grid adapted to the characteristicsof the terrain (concentrate density of points in high variability regions). • Fornoisy measures • Define a regular grid at the finest admissible level of representation • Recursiely update the grid pointsusing the data set (Recursive Least Squares) • Apply ROAM to obtain a variable grid adapted to the geometry of the represented terrain. • New error metric Nice, 17/18 December 2001
Error Metrics • We use two error metrics: • 1. Geometric error: The angle α between the two children • 2. Statistical error: The mean of the variances of the points • that build up the triangle. • It indicates if the triangle is rather stable. α Nice, 17/18 December 2001
Recursive Least Squares (RLS) Linear Model: z(k) = T (k)(k) + e(k) :k-th data point :vector of grid points : interpolation operator Update equations: (k) = (k-1) + K(k) (z(k) - T (k) (k-1)) K(k) = P(k) (k) P(k) = P(k-1) – [P(k-1) (k) T (k)P(k-1)]/[1+ T (k)P(k-1) T (k)] P(k) is the covariance matrix K(k) is the gain vector Nice, 17/18 December 2001
Mapping Offline (example) Trajectory of the robot Reconstructed surface (artificial noise with a variance of 1 has been added) Nice, 17/18 December 2001
ROAM for On-line Mapping • Problem: • No a priori knowledge of the surface support S • Solution: • Dynamic expansion of the grid • Start with a grid of a fixed size.If the robot goes outside the grid • Add a new grid of the same size and link it to its neighbors Nice, 17/18 December 2001
ROAM for On-line Mapping Modifications of the original ROAM algorithm • Split and merge operations • New boundaries constraints • Linking the new triangle binary trees • Maintaining ROAM structure Merging the smal grids into bigger grids when possible Nice, 17/18 December 2001
Mapping Online (example) Trajectory of the robot On-line reconstructed surface Nice, 17/18 December 2001
Conclusions and future work • Conclusions • ROAM is efficient and structured • The off-line version is fully implemented. • The on-line partially implemented. • Future work • Introduce the changes required for the on-line version. • Evaluate the obtained map from a navigation point of view. Nice, 17/18 December 2001