Download
1 / 32
320 likes | 535 Views
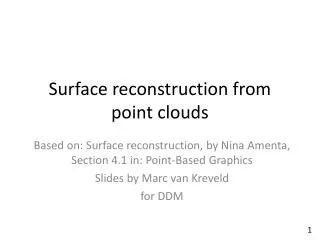
The Intrinsic Shape of Point Clouds Stefan Ohrhallinger Ph.D. Defence, July 12, 2012. Motivation. 2. Scan reconstruct. Deforming points. De-noising. “Fluid” simulation. Shape retrieval. Visibility culling. Motivation. Operations on point clouds require an assumed surface. 3.

E N D
The Intrinsic Shape of Point Clouds Stefan Ohrhallinger Ph.D. Defence, July 12, 2012
Scan reconstruct. Deforming points De-noising “Fluid” simulation Shape retrieval Visibility culling Motivation Operations on point clouds require an assumed surface 3
Problem Domain Unreliable normals Noise and outliers Holes Local non-uniform Too “random” Sparse sampling Characteristics of real-world point data sets • “[...] to pose a unifying general problem [...]” - [Hoppe et al. 1992]1 1 Hoppe, DeRose, Duchamp, McDonald and Stuetzle. Surface reconstruction from unorganized points. Computer Graphics, 1992. 4
Related Work Approximate Interpolate Uniform Non-uniform Region grow. Deterministic Local Global Optimize Filter Sculpture 5
Shape Formalization Shape Characteristic Boundary Reconstruction Contributions S. Ohrhallinger, S. Mudur: Interpolating an unorganized 2D point cloud with a single closed shape, Computer-Aided Design, 2011. S. Ohrhallinger, S. Mudur. An Efficient Algorithm for Determining an Aesthetic Shape Connecting Unorganized 2D Points (under review) S. Ohrhallinger, S. Mudur. The Intrinsic Shape of Unorganized 3D Point Sets: Computing an Interpolating Orientable Surface (under review) (A concise overview of the 3D method won Best Poster Award at Eurographics 2012, published in the conference proceedings) 6
Shape Gestalt Guided by Gestalt principles of form perception Proximity Continuity Closure Derive for piece-wise linear boundary B: In R², just minimize boundary length 7
NP-hard Point set R²: Boundary Complex ? MST Vertex degree 8
R²: R³: Boundary Complex R²: R³: Edge length is 1 factor Longest-edge-in-triangle Mean curvature: R³: 9
BC0:Shape Character • BC0 Bmin approximation 10
36K points BC0: Varying Density 0.1k points (0.3%) 1k points (3%) Property: Reducing point density does not affect shape approximation 11
BC0: Adding Noise Catacomb section slightly perturbed extremely perturbed Property: Adding noise does not impede construction 12
Reconstruction in R² Inflate Sculpture Manifold Hull Interpolating Manifold 13
R²: Improved Results Points [DW01]1 Ours 1 Dey, Wenger. Detecting undersampling in surface reconstruction. SCG 2001. 14
R²: Large Point Sets 10k points [Dey, Wenger 2001]1 Ours: manifold 1 Dey, Wenger. Detecting undersampling in surface reconstruction. SCG 2001. 15
R²: Extreme details Points [DW01]1 Ours 1 Dey, Wenger. Detecting undersampling in surface reconstruction. SCG 2001. 16
R²: Noisy Point Sets [Mehra et al. 2010]1 Ours: manifold + interpolating 1 Mehra, Tripathi, Sheffer and Mitra. Visibility of noisy point cloud data, Computers & Graphics, 2010. 17
R²: Exhaustive Search Ours: Local Minimum [Ohrhallinger, Mudur 2011]1 1 S. Ohrhallinger, S. Mudur: Interpolating an unorganized 2D point cloud with a single closed shape, Computer-Aided Design, 2011. 18
Reconstruction in R³ thin thick bounds hole inflate sculpture Manifold Hull Interpolating Manifold flip edges after, cover holes before 19
Covering Hull Holes inflate cover 20
Sculpturing Sculpture from in and outside Pop Membranes where possible (Dominantly) interior points may remain (no free lunch) 21
Results in R³ compared [DG03]1 Ours Improves especially for sparse and non-uniform point spacing 1 Dey, Goswami. Tight cocone: a water-tight surface reconstructor, SM 2003. 23
Noise Tolerance in R³ [DG06]1 Ours 1 Dey, Goswami. Provable surface reconstruction from noisy samples, Computational Geometry: Theory and Applications, 2006. 25
Limitations Very locally non-uniform sampling Sparse 'overlap': Saddle-type holes (cover is not a single disk) Since we require O(n log n) time, local minima may be produced (more extensive searching could avoid that) 26
Sampling Condition Boundary Operator Minimum Spanning Surface Future Work De-noising Recover topology of deforming point sets Shape understanding, i.e. retrieval Invited post-doc in graphics group at Vienna Univ. of Technology 27
Shape Formalization Shape Characteristic Boundary Reconstruction Conclusion Thesis statement: “Point clouds contain an intrinsic shape, minimizing an objective, which can be efficiently searched.” 28
Extension: Sampling A priori knowledge (shape closedness) permits sub-Nyquist reconstruction Reconstruction of Bmin guaranteed in O(n log n) Boundary neighbors: reciprocal relation Minimal Umbrella (Boundary Operator) Sampling Condition: empty circumcircle [ABE98]1 Dense sampling Sparse sampling 1 Amenta, Bern, Eppstein. The Crust and the β-Skeleton: Combinatorial Curve Reconstruction, Graphical Models and Im. Proc., 1998. 29
Extension: MSS R² R³ Rn ? Minimum Spanning Tree Minimum Spanning Surface MSS Boundary Complex Boundary Complex BC 30