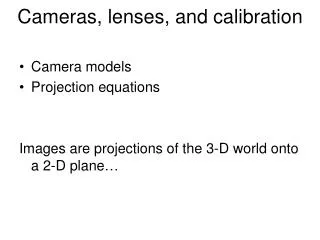
Download
1 / 59
600 likes | 798 Views
Stanford CS223B Computer Vision, Winter 2005 Lecture 2 Lenses and Camera Calibration. Sebastian Thrun, Stanford Rick Szeliski, Microsoft Hendrik Dahlkamp, Stanford. News of the Day. Homework assignment 1 is up(?) Reading list on the Web 14 projects on the Web. Today’s Goals. Thin Lens

E N D
Stanford CS223B Computer Vision, Winter 2005Lecture 2 Lenses and Camera Calibration Sebastian Thrun, Stanford Rick Szeliski, Microsoft Hendrik Dahlkamp, Stanford
News of the Day • Homework assignment 1 is up(?) • Reading list on the Web • 14 projects on the Web
Today’s Goals • Thin Lens • Aberrations • Calibration
Pinhole Camera -- Brunelleschi, XVth Century Marc Pollefeys comp256, Lect 2
Snell’s Law Snell’s law n1 sina1 = n2 sin a2
Thin Lens: Definition focus optical axis f Spherical lense surface: Parallel rays are refracted to single point
Thin Lens: Projection optical axis Image plane f z Spherical lense surface: Parallel rays are refracted to single point
Thin Lens: Projection optical axis Image plane f f z Spherical lense surface: Parallel rays are refracted to single point
Thin Lens: Properties • Any ray entering a thin lens parallel to the optical axis must go through the focus on other side • Any ray entering through the focus on one side will be parallel to the optical axis on the other side
Thin Lens: Model Q P O Fr Fl p R Z f f z
The Thin Lens Law Q P O Fr Fl p R Z f f z
Limits of the Thin Lens Model 3 assumptions : • all rays from a point are focused onto 1 image point • Remember thin lens small angle assumption 2. all image points in a single plane 3. magnification is constant Deviations from this ideal are aberrations
Today’s Goals • Thin Lens • Aberrations • Calibration
Aberrations 2 types : geometrical : geometry of the lense, small for paraxial rays chromatic : refractive index function of wavelength Marc Pollefeys
Geometrical Aberrations • spherical aberration • astigmatism • distortion • coma aberrations are reduced by combining lenses
Spherical Aberration rays parallel to the axis do not converge outer portions of the lens yield smaller focal lenghts
Astigmatism Different focal length for inclined rays Marc Pollefeys
Distortion magnification/focal length different for different angles of inclination pincushion (tele-photo) barrel (wide-angle) Can be corrected! (if parameters are know) Marc Pollefeys
Coma point off the axis depicted as comet shaped blob Marc Pollefeys
Chromatic Aberration rays of different wavelengths focused in different planes cannot be removed completely Marc Pollefeys
Vignetting Effect: Darkens pixels near the image boundary
CCD vs. CMOS Mature technology Specific technology High production cost High power consumption Higher fill rate Blooming Sequential readout Recent technology Standard IC technology Cheap Low power Less sensitive Per pixel amplification Random pixel access Smart pixels On chip integration with other components Marc Pollefeys
Today’s Goals • Thin Lens • Aberrations • Calibration • Problem definition • Solution with Homogeneous Parameters • Solution by nonlinear Least Squares method • Distortion
Intrinsic Camera Parameters • Determine the intrinsic parameters of a camera (with lens) • What are Intrinsic Parameters?
Intrinsic Camera Parameters • Determine the intrinsic parameters of a camera (with lens) • Intrinsic Parameters: • Focal Length f • Pixel size sx ,sy • Distortion coefficients k1 ,k2… • Image center ox ,oy
A Quiz • Can we determine all intrinsic parameters by … exposing the camera to many known objects?
Another Quiz (the last today) • How Many Flat Calibration Targets are Needed for Calibration? 1: 2: 3: 4: 5: 10 • How Many Corner Points do we need in Total? 1: 2: 3: 4: 10: 20
Projective Perspective of Parallel Board 10cm 20cm 30cm
Projective Perspective of Tilted Board 10cm 20cm 30cm 50cm 100cm 500cm
Perspective Camera Model Object Space
Calibration: 2 steps • Step 1: Transform into camera coordinates • Step 2: Transform into image coordinates
Calibration Model (extrinsic) Homogeneous Coordinates
Homogeneous Coordinates • Idea: Most Operations Become Linear! • Extract Image Coordinates by Z-normalization
Advantage of Homogeneous C’s i-th data point
Calibration Model (intrinsic) Focal length Pixel size Image center
Summary Parameters • Extrinsic • Rotation • Translation • Intrinsic • Focal length • Pixel size • Image center coordinates • (Distortion coefficients)
Summary Parameters, Revisited • Focal length, in pixel units • Aspect ratio • Extrinsic • Rotation • Translation • Intrinsic • Focal length • Pixel size • Image center coordinates • (Distortion coefficients)
Today’s Goals • Thin Lens • Aberrations • Calibration • Problem definition • Solution with Homogeneous Parameters • Solution by nonlinear Least Squares method • Distortion
Calibration a la Trucco • Substitute • Advantage: Equations are linear in params • If over-constrained, minimize Least Mean Square fct • One possible solution: • Enforce constraint that R is rotation matrix • Lots of considerations to recover individual params…
Today’s Goals • Thin Lens • Aberrations • Calibration • Problem definition • Solution with Homogeneous Parameters • Solution by nonlinear Least Squares method • Distortion
Calibration by nonlinear Least Squares • Calibration Examples: …
Calibration by nonlinear Least Squares • Least Squares
Calibration by nonlinear Least Squares • Least Mean Square • Gradient descent: