Download
1 / 49
490 likes | 619 Views
Stanford CS223B Computer Vision, Winter 2007 Lecture 8 Structure From Motion. Professors Sebastian Thrun and Jana Ko š eck á CAs: Vaibhav Vaish and David Stavens Slide credit: Gary Bradski, Stanford SAIL. Summary SFM. Problem Determine feature locations (=structure)

E N D
Stanford CS223B Computer Vision, Winter 2007Lecture 8 Structure From Motion Professors Sebastian Thrun and Jana Košecká CAs: Vaibhav Vaish and David Stavens Slide credit: Gary Bradski, Stanford SAIL
Summary SFM • Problem • Determine feature locations (=structure) • Determine camera extrinsic (=motion) • Two Principal Solutions • Bundle adjustment (nonlinear least squares, local minima) • SVD (through orthographic approximation, affine geometry) • Correspondence • (RANSAC) • Expectation Maximization
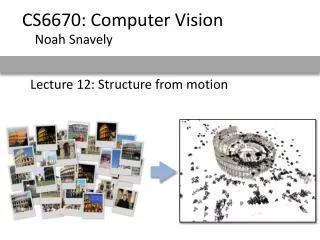
Structure From Motion features camera Recover: structure (feature locations), motion (camera extrinsics)
SFM = Holy Grail of 3D Reconstruction • Take movie of object • Reconstruct 3D model • Would be commercially highly viable live.com
Structure From Motion (1) [Tomasi & Kanade 92]
Structure From Motion (2) [Tomasi & Kanade 92]
Structure From Motion (3) [Tomasi & Kanade 92]
Structure From Motion (4a): Images Marc Pollefeys
Structure From Motion (4b) Marc Pollefeys
Structure From Motion (5) http://www.cs.unc.edu/Research/urbanscape
Structure From Motion • Problem 1: • Given n points pij =(xij, yij) in m images • Reconstruct structure: 3-D locations Pj =(xj, yj, zj) • Reconstruct camera positions (extrinsics) Mi=(Aj, bj) • Problem 2: • Establish correspondence: c(pij)
Structure From Motion features camera Recover: structure (feature locations), motion (camera extrinsics)
SFM: General Formulation O X -x Z f
SFM: Bundle Adjustment O X -x Z f
Bundle Adjustment • SFM = Nonlinear Least Squares problem • Minimize through • Gradient Descent • Conjugate Gradient • Gauss-Newton • Levenberg Marquardt common method • Prone to local minima
Count # Constraints vs #Unknowns • m camera poses • n points • 2mn point constraints • 6m+3n unknowns • Suggests: need 2mn 6m + 3n • But: Can we really recover all parameters???
How Many Parameters Can’t We Recover? We can recover all but… m = #camera poses n = # feature points Place Your Bet!
Count # Constraints vs #Unknowns • m camera poses • n points • 2mn point constraints • 6m+3n unknowns • Suggests: need 2mn 6m + 3n • But: Can we really recover all parameters??? • Can’t recover origin, orientation (6 params) • Can’t recover scale (1 param) • Thus, we need 2mn 6m + 3n -7
Are we done? • No, bundle adjustment has many local minima.
The “Trick Of The Day” Replace Perspective by Orthographic Geometry Replace Euclidean Geometry by Affine Geometry Solve SFM linearly via PCA (“closed” form, globally optimal) Post-Process to make solution Euclidean Post-Process to make solution perspective By Tomasi and Kanade, 1992
Orthographic Camera Model Extrinsic Parameters Rotation Orthographic Projection Orthographic = Limit of Pinhole Model:
Orthographic Projection Limit of Pinhole Model: Orthographic Projection
The Orthographic SFM Problem subject to
The Affine SFM Problem drop the constraints subject to
Count # Constraints vs #Unknowns • m camera poses • n points • 2mn point constraints • 8m+3n unknowns • Suggests: need 2mn 8m + 3n • But: Can we really recover all parameters???
How Many Parameters Can’t We Recover? We can recover all but… Place Your Bet!
The Answer is (at least): 12 = A ' A C i i
Points for Solving Affine SFM Problem • m camera poses • n points • Need to have: 2mn 8m + 3n-12
Affine SFM Fix coordinate system by making pi0=P0=origin Rank Theorem: Q has rank 3 Proof:
The Rank Theorem 2m elements n elements
Affine Solution to Orthographic SFM Gives also the optimal affine reconstruction under noise
Back To Orthographic Projection Find C for which constraints are met Search in 9-dim space (instead of 8m + 3n-12)
Back To Projective Geometry Orthographic (in the limit) Projective
Back To Projective Geometry O X -x Z f Optimize Using orthographic solution as starting point
The “Trick Of The Day” Replace Perspective by Orthographic Geometry Replace Euclidean Geometry by Affine Geometry Solve SFM linearly via PCA (“closed” form, globally optimal) Post-Process to make solution Euclidean Post-Process to make solution perspective By Tomasi and Kanade, 1992
Structure From Motion • Problem 1: • Given n points pij =(xij, yij) in m images • Reconstruct structure: 3-D locations Pj =(xj, yj, zj) • Reconstruct camera positions (extrinsics) Mi=(Aj, bj) • Problem 2: • Establish correspondence: c(pij)
The Correspondence Problem View 1 View 2 View 3
Correspondence: Solution 1 • Track features (e.g., optical flow) • …but fails when images taken from widely different poses
Correspondence: Solution 2 • Start with random solution A, b, P • Compute soft correspondence: p(c|A,b,P) • Plug soft correspondence into SFM • Reiterate See Dellaert/Seitz/Thorpe/Thrun, Machine Learning Journal, 2003
Correspondence: Alternative Approach • Ransac [Fisher/Bolles] = Random sampling and consensus • Will be discussed Wednesday
Summary SFM • Problem • Determine feature locations (=structure) • Determine camera extrinsic (=motion) • Two Principal Solutions • Bundle adjustment (nonlinear least squares, local minima) • SVD (through orthographic approximation, affine geometry) • Correspondence • (RANSAC) • Expectation Maximization