Download
1 / 15
160 likes | 459 Views
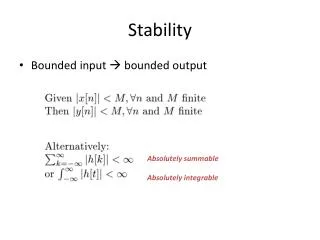
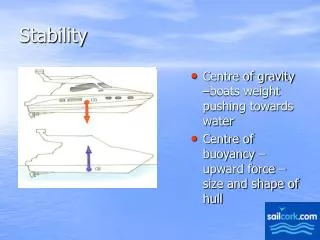
Stability. Many possible definitions Two key issues for practical systems System response to zero input: internal stability System response to non-zero but finite amplitude (bounded) input: bounded input bounded output (BIBO) stability. For zero-input response

E N D
Many possible definitions Two key issues for practical systems System response to zero input: internal stability System response to non-zero but finite amplitude (bounded) input: bounded input bounded output (BIBO) stability For zero-input response If a system remains in a particular state (or condition) indefinitely, then state is an equilibrium state of system System’s output due to nonzero initial conditions should approach 0 as t System’s output generated by initial conditions is made up of characteristic modes Stability
Stability • Three cases for zero-input response A system is stable if and only if all characteristic modes go to 0 as t A system is unstable if and only if at least one of the characteristic modes grows without bound as t A system is marginally stable if and only if the zero-input response remains bounded (e.g. oscillates between lower and upper bounds) as t
Right-handplane (RHP) Im{l} Stable Unstable Re{l} MarginallyStable Left-handplane (LHP) Characteristic Modes • Distinct characteristic roots l1, l2, …, ln Where l = s + j win Cartesian form Units of w are in radians/second
Repeated roots For r repeated roots of value l. For positive k Decaying exponential decays faster thantk increases for any value of k One can see this by using the Taylor Series approximation for elt about t = 0: Characteristic Modes
Stability Conditions • An LTIC system is asymptotically stable if and only if all characteristic roots are in LHP. The roots may be simple (not repeated) or repeated. • An LTIC system is unstable if and only if either one or both of the following conditions exist: (i) at least one root is in the right-hand plane (RHP) (ii) there are repeated roots on the imaginary axis. • An LTIC system is marginally stable if and only if there are no roots in the RHP, and there are no repeated roots on imaginary axis
f(t) h(t) y(t) Response to Bounded Inputs • Stable system: a bounded input (in amplitude) should give a bounded response (in amplitude) • Test for linear-time-invariant (LTI) systems • Bounded-Input Bounded-Output (BIBO) stable
Impact of Characteristic Modes • Zero-input response consists of the system’s characteristic modes • Stable system characteristic modes decay exponentially and eventually vanish • If input has the form of a characteristic mode, then the system will respond strongly • If input is very different from the characteristic modes, then the response will be weak
Impact of Characteristic Modes • Example: First-order system with characteristic mode el t • Three cases
h(t) 1/RC e-1/RC t t System Time Constant • When an input is applied to a system, a certain amount of time elapses before the system fully responds to that input Time lag or response time is the system time constant No single mathematical definition for all cases • Special case: RC filter Time constant is t = RC Instant of time at whichh(t) decays to e-1 0.367 of its maximum value
h(t) ĥ(t) h(t0) h(t) t t0 th System Time Constant • General case: Effective duration is th seconds where area under ĥ(t) C is an arbitrary constant between 0 and 1 Choose th to satisfy this inequality • General case appliedto RC time constant:
u(t) h(t) y(t) h(t) u(t) A 1 t t Step Response • y(t) = h(t) * u(t) • Here, tris the rise time of the system • How does the rise time trrelate to the system time constant of the impulse response? • A system generally does not respond to an input instantaneously y(t) A th t tr tr
Filtering and Time Constant Impulse response Response to high frequency input Response to low frequency input 13
Filtering • A system cannot effectively respond to periodic signals with periods shorter than th • This is equivalent to a filter that passes frequencies from 0 to 1/th Hz and attenuates frequencies greater than 1/th Hz (lowpass filter) 1/th is called the cutoff frequency 1/tr is called the system’s bandwidth (tr = th) • Bandwidth is the width of the band of positive frequencies that are passed “unchanged” from input to output
Transmission of Pulses • Transmission of pulses through a system (e.g. communication channel) increases the pulse duration (a.k.a. spreading or dispersion) • If the impulse response of the system has durationth and pulse had durationtpseconds, then the output will have duration th + tp • Refer to slides 5-2, 5-3 and 5-4