Download
1 / 80
930 likes | 1.32k Views
3. Truss Structure. 3.1 Foundations of mechanics 3.2 Plane truss example 3.3 Structure discrete into elements 3.4 Element analysis and coordinate transformation 3.5 Assemble 3.6 Apply boundary conditions 3.7 Examples. 3.1 Foundations of mechanics.

E N D
3. Truss Structure 3.1 Foundations of mechanics 3.2 Plane truss example 3.3 Structure discrete into elements 3.4 Element analysis and coordinate transformation 3.5 Assemble 3.6 Apply boundary conditions 3.7 Examples
3.1 Foundations of mechanics Mechanics assumptions and formulas • Geometry: one dimension is large, other two dimensions are small. Length of the bar is far greater than the sizes of cross-section of the bar. The bar is straight. • Material: linear, elastic and isotropic. obeys Hooke’s law. • Loading: The bar supports axial loading only. • Normal stress uniformly distribute on section
Differential equation: Strain energy: External Work: Total potential energy: Principle of virtual displacement:
Equivalent integration weak form 2-node bar element D.E. F.B.C. Nodal displacement
Weighted function v multiply D.E., and integrate over element Apply integration by parts to the first term Substitute F.B.C into boundary terms, we obtain equivalent integration weak form
Principle of virtual displacement Take the weighted function v as virtual displacement can take as virtual strain We obtain principle of virtual displacement form the equivalent integration weak form External work by distributed load q Internal work External work by concentrated forces P
Functional and total potential energy Take the weighted function v as variation of displacement Apply the rules of variation, we have Therefore, we obtain functional, it is also total potential energy
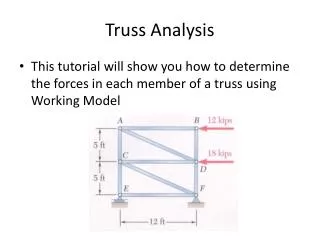
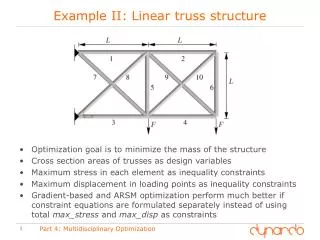
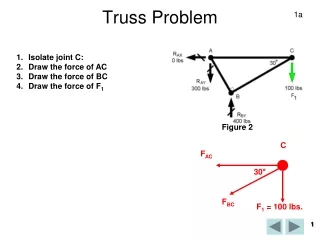
3.2 Plane truss example Elastic modulus of material Coefficient of thermal expansion Area of cross-section of bars 2-th and 3-th bars rise up 50 degree. 2-th and 3-th nodes is loaded forces as illustrated in figure. Find nodal displacements, internal force of bars and reactions.
3.3 Structure discrete into elements >>Ae=100; %杆截面面积 Nodes ID for elements • %结点坐标 >>Coords=[0 0; 400 0; 400 300; 0 300] Coordinates for nodes • %单元结点编号 >>Elems=[1 2; 3 2; 1 3; 4 3]
3.4 Element analysis and coordinate transformation Nodal vectors of 2-node bar /truss /link /spar/ element Two nodes with local nodal number 1 and 2. The displacement of each node has a components: axial displacement u. The force of each node has a components: axial force f. The nodal degrees of freedom vector is The vector of nodal forces is
Using direction stiffness method to derive element equation Equilibrium equations: (1) Geometry equations: (2) Physical equations: (3) From above three equations, we get (4)
In FEM, nodal forces and displacements are positive if their directions are same with axis positive direction; and are negative if their directions are same with axis negative direction. In structure mechanics, truss inner forces are positive if trusses are in tension and are negative if trusses are in compression.
From the definitions, the relationship of inner force and nodal forces is (5) The relationship of deformation and nodal displacements is (6) Substituted Eq. (5) and Eq. (6) into Eq. (4), we have
Written in matrix form: Namely:
Equivalent nodal forces of distributed body forces From equilibrium of member bar, we get nodal reaction: From equilibrium of nodes, we know that equivalent nodal forces are equal to nodal reactions, but have reverse directions. In matrix form
nodal force vector of concentrated forces is Linear elastic structures satisfy superposition principle, we get elemental equilibrium equation: Where
Properties of elemental stiffness matrix represents the force at i-th DOF would arise on prescribing a unit displacement at j-th DOF, while all other displacements vanish. it is called as stiffness coefficients. (1) symmetric (2) singular For a given nodal displacement vector, nodal force vector can be determined from element equation, nodal forces satisfy equilibrium. Reversely, For a given nodal force vector that satisfy equilibrium, nodal displacement vector can’t derived from element equation. Element exists rigid body movement. (3)diagonal elements are positive
x-coordinate of node 1. x-coordinate of node 2. -coordinate of node 1. -coordinate of node 2. -coordinate is a natural coordinate system. Coordinates map x-coordinate is a physical coordinate system The transformation between coordinate systems is
Shape function (interpolated function) The displacement within the element is (1) where Substitute nodal data into formula (1) Write into matrix notation
where The linear displacement field within the element can be written in terms of the nodal displacement u1 and u2 as
Property of shape functions (1) Deltar function properties (2) Partitions of unity property Rigid body movement It needs nd is the number of element nodes
Strain and stress expression with nodal displacement The strain-displacement relationship is Upon using the chain rule of differentiation, we obtain From stress-strain relationship, the stress is
Using principle of minimum potential energy to derive element equation (Ritz method) The potential energy (functional) of element: is the element strain energy. is the element stiffness matrix.
If the body force is constant within the element, external work by it is is equivalent nodal force vector for body force. Define concentrated force vector as External work by concentrated forces are
Therefore, element potential energy written in matrix form are Apply extremum condition of the principle of minimum potential energy We obtain element equilibrium equation where
, We introduce a virtual displacement field and associated virtual strain Using principle of virtual displacements to derive element equation Equation of virtual displacement principle is The first term represents the internal virtual work, while the load terms represent the external virtual work.
Virtual displacement and associated virtual strain expressed by nodal displacement and shape functions where Internal virtual work can be expressed as We obtain element stiffness matrix ke
Because are the arbitrary nodal displacement, we obtained External virtual work by distributed load q is External virtual work by concentrated load P is Virtual work equation written in matrix form is
Using Galerkin’s method to derive element equation The equivalent integration weak statement of differential equation and its boundary conditions. Take weighting functions Matrix form:
With definition ,upon formula rewrite into Substitute into above, we have In matrix notation Where
Temperature effects For an isotropic linearly elastic material, the thermal strain can be treated as initial strain. For 1D problem, Stress-strain relation is given by The strain energy of element e is
Examine the strain energy expression, we see that the first term on the right side yields the element stiffness matrix; the last term is a constant term and is of no consequence since it drops out of the equilibrium equations, which are obtained by setting The second term yields the desired element load vector The element load vector is
Local-global coordinate transformation for 2-D In local coordinate system, In global coordinate system,
Write into matrix format 2D transformation matrix T where
Local-global coordinate transformation for 3-D In local coordinate system, In global coordinate system, 3D transformation matrix T
Element inner force is element inner nodal displacement vector in element local coordinate system.
Matlab functions for 2-node bar element Matlab function for element stiffness matrix function [ke]=barke(ecoords,Ae,E); dxyz=(ecoords(2,:)-ecoords(1,:))';%dxyz=[x2-x1;y2-y1;z2-z1] L=sqrt(dxyz'*dxyz); %杆单元长度 keloc=E*Ae/L*[ 1 -1; -1 1]; %1D杆单元刚度矩阵,即局部坐标下单元刚度矩阵 n=dxyz'/L; %杆单元方向余弦 G=[ n zeros(size(n)); zeros(size(n)) n ]; %杆单元坐标转换矩阵 ke=G'*keloc*G; %总体坐标下单元刚度矩阵
Matlab function for equivalent nodal force vector of distributed load q. function [fq]=barfq(ecoords,A,q); dxyz=(ecoords(2,:)-ecoords(1,:))';%dxyz=[x2-x1;y2-y1;z2-z1] L=sqrt(dxyz'*dxyz); %杆单元长度 n=dxyz'/L; %杆单元方向余弦 G=[ n zeros(size(n)); zeros(size(n)) n ]; %杆单元坐标转换矩阵 fqloc=q*L/2*[1;1]; %局部坐标下均布线荷载等效结点力向量 fq=G'*fqloc; %总体坐标下均布线荷载等效结点力向量
Matlab function for equivalent nodal force vector of temperature load. function [fT]=barfT(ecoords,A,E,alph,dT); dxyz=(ecoords(2,:)-ecoords(1,:))';%dxyz=[x2-x1;y2-y1;z2-z1] L=sqrt(dxyz'*dxyz); %杆单元长度 n=dxyz'/L; %杆单元方向余弦 G=[ n zeros(size(n)); zeros(size(n)) n ]; %杆单元坐标转换矩阵 fTloc=E*A*alph*dT*[-1;1]; %局部坐标下温度等效结点力向量 fT=G'*fTloc; %总体坐标下温度等效结点力向量
Matlab function for element inner force function [N]=barforce(ecoords,A,E,ue); dxyz=(ecoords(2,:)-ecoords(1,:))';%dxyz=[x2-x1;y2-y1;z2-z1] L=sqrt(dxyz'*dxyz); %杆单元长度 n=dxyz'/L; %杆单元方向余弦 G=[ n zeros(size(n)); zeros(size(n)) n ]; %杆单元坐标转换矩阵 uloc=G*ue; %计算单元局部结点位移向量[2x1]. N=E*A/L*[-1 1]*uloc; %计算单元结点内力
Compute element matrix and vectors for plane truss example Element stiffness matrix for element 1 >> Coords=[0 0; 400 0;400 300;0 300]; %结点坐标 • >>Elems=[1 2; 3 2;1 3;4 3]; %单元结点编号 >>E=200e3; %材料弹性模量 >>Ae=100; %杆截面面积 >>ecoords=Coords(Elems(1,:),:);%取单元结点坐标 >>ki=barke(ecoords,Ae,E)%生成单元刚度矩阵 ki = 50000 0 -50000 0 0 0 0 0 -50000 0 50000 0 0 0 0 0
Equivalent nodal force vector for element 2 rising up 50 degree. >> alph=1/150000; >>dT=50; >>ecoords=Coords(Elems(2,:),:); %取单元结点坐标 >>fti=barfT(ecoords,Ae,E,alph,dT) %计算温度等效结点力向量 fti = 1.0e+003 * 0 6.6667 0 -6.6667
3.5 Assembly From , we obtained Minimum potential energy principle (Ritz method) The potential energy: Account for the element connectivity, the total potential energy can be written as where Kis the global stiffness matrix. Fis the global load vector. uis the global displacement vector. Assemble the global stiffness matrix and load vector
Principle of virtual displacement Principle of virtual displacement for structure is After discrete into element, it can write into sum of element virtual work In matrix form By connecting elements into structure, we have For is arbitrary virtual displacement, we have
Galerkin method Equivalent weak form for structure is After discrete into element, it can write into sum of element virtual work In matrix form By connecting elements into structure, we have