Download
1 / 12
130 likes | 240 Views
Predictable Design for Real-time Embedded Control A Case Study. Jinfeng Huang & Jeroen Voeten Eindhoven University of Technology . PROGR E SS. A running example: railroad crossing Problems in current design practice Compositional design approach Demo. Contents. Railroad Crossing.

E N D
Predictable Design for Real-time Embedded Control A Case Study Jinfeng Huang & Jeroen Voeten Eindhoven University of Technology PROGRESS
A running example: railroad crossing Problems in current design practice Compositional design approach Demo Contents
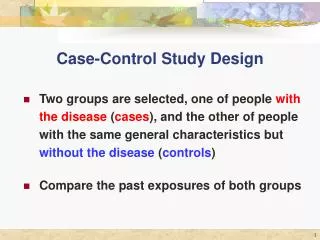
Railroad Crossing • Trains run independently at different velocities • Velocities are constant • Avoid collisions • As efficient as possible
Check Crossing Stop Motor Delay (D) Critical Zone Crossing Area Sensor A D T+D+ T Current Practice Train A Crossing Train B Start Motor
SensorA signaled T Delay D T+D Check Crossing T+D+1 Stop motor T+D+1+2 Timing Property Between D and D+ seconds after Train A has passed Sensor A, “Train A” checks the Crossing and stops the trainif the Crossing is occupied • (Timed) execution trace of “Train A”: 1+2 ?
Other components running SensorA signaled T T+1 T+1+D+2 T+1+D +2+1+3 Delay D T+1+D Check Crossing T+1+D +2+1 Stop motor T+1+D +2+1+3+2 Timing Property - Add other Components • e.g. to control other trains or crossings. • (Timed) execution trace of “Train A” (disturbed by other components): 1+2+3+1+2 BOOM !!!
Problems in current practice • Behaviors of components are not compositional • Debug and analysis codes “pollute” the timing behavior of the system • Lack reusability, maintainability, portability etc. • Lack facilities to guarantee property preservation: Implementation exhibits unexpected behaviors not present in the model
Compositional Approach (Modeling) • POOSL: Based on a two-phase execution frame: actions are instantaneous and time progress is represented in a virtual way (instead of based directly on a physical clock) • Compositional semantics • Executable • Expressive (concurrency, time, communication…)
Abstract Model Refinement Refinement Extended Model Simulation Train A Train B Crossing Image Image Estimation of Synthesis Model LEGO DACTA Interface Synthesis Compositional Approach (Modeling) Verification
Compositional Approach (Synthesis) • Automatic code generation (RT-Rotalumis,C++) • Real-time property-preserving mapping guaranteed by the -hypothesis • The execution tree: ordering of actions is kept from model to implementation • Synchronization between virtual time and physical time: if an action happens at virtual time t in model it happens in physical time interval (t-/2,t+/2) in implementation
Demo: The Railroad Crossing • Velocity TrainA: 40 cm/s • Velocity TrainB: 90 cm/s Abstract Model Extended Model Rapid analysis Synthesis Model Realization Models and video are not included in the presentation. For those who are interested, please mailto: j.huang@tue.nl
Future Work and Open Issues • Mapping efficiency • Prediction / platform requirements • Multi-processor platforms • Streaming data • Continuous-time environmental models • Tools