Download
1 / 1
10 likes | 138 Views
Simulation. concurrency synchronous communication timing functionality. Property Preserving Code Generation ε-Hypothesis. Performance Analysis Markov Chain. Formal Verification Model Checking. POOSL Model. Formal Semantics Timed Probabilistic Labelled Transition System.

E N D
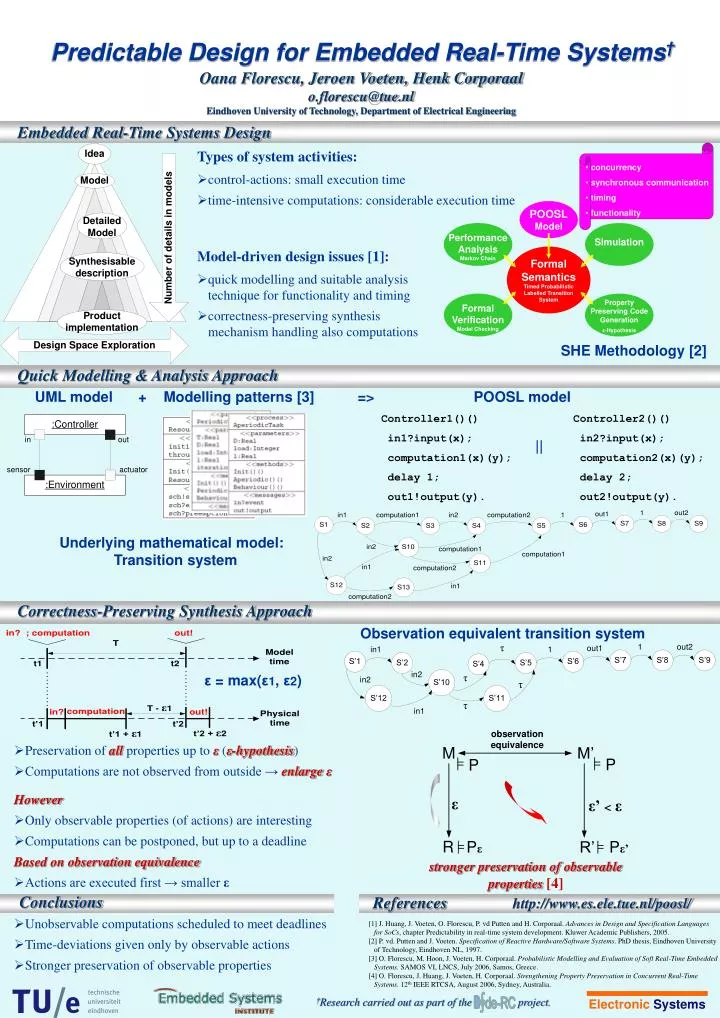
Simulation • concurrency • synchronous communication • timing • functionality Property Preserving Code Generation ε-Hypothesis Performance Analysis Markov Chain Formal Verification Model Checking POOSL Model Formal Semantics Timed Probabilistic Labelled Transition System ElectronicSystems Predictable Design for Embedded Real-Time Systems† Oana Florescu, Jeroen Voeten, Henk Corporaal o.florescu@tue.nl Eindhoven University of Technology, Department of Electrical Engineering Embedded Real-Time Systems Design Types of system activities: • control-actions: small execution time • time-intensive computations: considerable execution time Model-driven design issues [1]: • quick modelling and suitable analysis technique for functionality and timing • correctness-preserving synthesis mechanism handling also computations SHE Methodology [2] Quick Modelling & Analysis Approach UML model + Modelling patterns[3] => POOSL model Controller1()() in1?input(x); computation1(x)(y); delay 1; out1!output(y). Controller2()() in2?input(x); computation2(x)(y); delay 2; out2!output(y). || Underlying mathematical model: Transition system Correctness-Preserving Synthesis Approach Observation equivalent transition system ε = max(ε1, ε2) • Preservation of all properties up to ε(ε-hypothesis) • Computations are not observed from outside → enlargeε However • Only observable properties (of actions) are interesting • Computations can be postponed, but up to a deadline Based on observation equivalence • Actions are executed first → smaller ε stronger preservation of observable properties [4] Conclusions References http://www.es.ele.tue.nl/poosl/ • Unobservable computations scheduled to meet deadlines • Time-deviations given only by observable actions • Stronger preservation of observable properties [1] J. Huang, J. Voeten, O. Florescu, P. vd Putten and H. Corporaal. Advances in Design and Specification Languages for SoCs, chapter Predictability in real-time system development. Kluwer Academic Publishers, 2005. [2] P. vd. Putten and J. Voeten. Specification of Reactive Hardware/Software Systems. PhD thesis, Eindhoven University of Technology, Eindhoven NL, 1997. [3] O. Florescu, M. Hoon,J. Voeten, H. Corporaal.Probabilistic Modelling and Evaluation of Soft Real-Time Embedded Systems. SAMOS VI, LNCS, July 2006, Samos, Greece. [4] O. Florescu, J. Huang, J. Voeten, H. Corporaal. Strengthening Property Preservation in Concurrent Real-Time Systems. 12th IEEE RTCSA, August 2006, Sydney, Australia. †Research carried out as part of the project.