Download
1 / 1
10 likes | 160 Views
HMT. HMT. Synthetic Cognitive Agent Situational Awareness Components Sanford T. Freedman and Julie A. Adams Department of Electrical Engineering and Computer Science Vanderbilt University Nashville, Tennessee USA 37235. Introduction

E N D
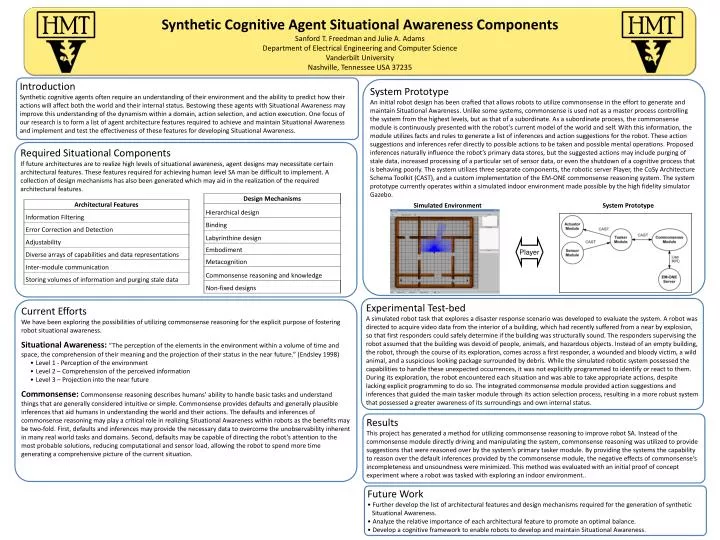
HMT HMT Synthetic Cognitive Agent Situational Awareness Components Sanford T. Freedman and Julie A. Adams Department of Electrical Engineering and Computer Science Vanderbilt University Nashville, Tennessee USA 37235 Introduction Synthetic cognitive agents often require an understanding of their environment and the ability to predict how their actions will affect both the world and their internal status. Bestowing these agents with Situational Awareness may improve this understanding of the dynamism within a domain, action selection, and action execution. One focus of our research is to form a list of agent architecture features required to achieve and maintain Situational Awareness and implement and test the effectiveness of these features for developing Situational Awareness. System Prototype An initial robot design has been crafted that allows robots to utilize commonsense in the effort to generate and maintain Situational Awareness. Unlike some systems, commonsense is used not as a master process controlling the system from the highest levels, but as that of a subordinate. As a subordinate process, the commonsense module is continuously presented with the robot’s current model of the world and self. With this information, the module utilizes facts and rules to generate a list of inferences and action suggestions for the robot. These action suggestions and inferences refer directly to possible actions to be taken and possible mental operations. Proposed inferences naturally influence the robot’s primary data stores, but the suggested actions may include purging of stale data, increased processing of a particular set of sensor data, or even the shutdown of a cognitive process that is behaving poorly. The system utilizes three separate components, the robotic server Player, the CoSy Architecture Schema Toolkit (CAST), and a custom implementation of the EM-ONE commonsense reasoning system. The system prototype currently operates within a simulated indoor environment made possible by the high fidelity simulator Gazebo. Simulated Environment System Prototype Required Situational Components If future architectures are to realize high levels of situational awareness, agent designs may necessitate certain architectural features. These features required for achieving human level SA man be difficult to implement. A collection of design mechanisms has also been generated which may aid in the realization of the required architectural features. Player Experimental Test-bed A simulated robot task that explores a disaster response scenario was developed to evaluate the system. A robot was directed to acquire video data from the interior of a building, which had recently suffered from a near by explosion, so that first responders could safely determine if the building was structurally sound. The responders supervising the robot assumed that the building was devoid of people, animals, and hazardous objects. Instead of an empty building, the robot, through the course of its exploration, comes across a first responder, a wounded and bloody victim, a wild animal, and a suspicious looking package surrounded by debris. While the simulated robotic system possessed the capabilities to handle these unexpected occurrences, it was not explicitly programmed to identify or react to them. During its exploration, the robot encountered each situation and was able to take appropriate actions, despite lacking explicit programming to do so. The integrated commonsense module provided action suggestions and inferences that guided the main tasker module through its action selection process, resulting in a more robust system that possessed a greater awareness of its surroundings and own internal status. • Current Efforts • We have been exploring the possibilities of utilizing commonsense reasoning for the explicit purpose of fostering robot situational awareness. • Situational Awareness: “The perception of the elements in the environment within a volume of time and space, the comprehension of their meaning and the projection of their status in the near future.” (Endsley 1998) • Level 1 - Perception of the environment • Level 2 – Comprehension of the perceived information • Level 3 – Projection into the near future • Commonsense: Commonsense reasoning describes humans’ ability to handle basic tasks and understand things that are generally considered intuitive or simple. Commonsense provides defaults and generally plausible inferences that aid humans in understanding the world and their actions. The defaults and inferences of commonsense reasoning may play a critical role in realizing Situational Awareness within robots as the benefits may be two-fold. First, defaults and inferences may provide the necessary data to overcome the unobservability inherent in many real world tasks and domains. Second, defaults may be capable of directing the robot’s attention to the most probable solutions, reducing computational and sensor load, allowing the robot to spend more time generating a comprehensive picture of the current situation. Results This project has generated a method for utilizing commonsense reasoning to improve robot SA. Instead of the commonsense module directly driving and manipulating the system, commonsense reasoning was utilized to provide suggestions that were reasoned over by the system’s primary tasker module. By providing the systems the capability to reason over the default inferences provided by the commonsense module, the negative effects of commonsense’s incompleteness and unsoundness were minimized. This method was evaluated with an initial proof of concept experiment where a robot was tasked with exploring an indoor environment.. • Future Work • Further develop the list of architectural features and design mechanisms required for the generation of synthetic Situational Awareness. • Analyze the relative importance of each architectural feature to promote an optimal balance. • Develop a cognitive framework to enable robots to develop and maintain Situational Awareness.