Download
1 / 19
200 likes | 356 Views
Towards an improved PEPT triangulation routine. J Newling 1 , AJ Morrison 1 , N Fowkes 2 , I Govender 1 and L Bbosa 1 1 University of Cape Town, Cape Town, South Africa 2 University of Western Australia, Perth, Australia. Minerals industry (gold, platinum, copper, etc …)

E N D
Towards an improved PEPT triangulation routine J Newling1, AJ Morrison1, N Fowkes2, I Govender1 and L Bbosa1 1 University of Cape Town, Cape Town, South Africa 2University of Western Australia, Perth, Australia
Minerals industry (gold, platinum, copper, etc …) Main aim is size reduction of extracted ore Very energy-intensive, however inefficient Aggressive environment,in situ measurement not feasible Models are empirical Mill specific Ore specific Tumbling Mills Mill diameter 0.3 – 5m Rotational speed 15 – 40 rpm
True Pairing Random Pairing Scattered Pairing Sources of false events
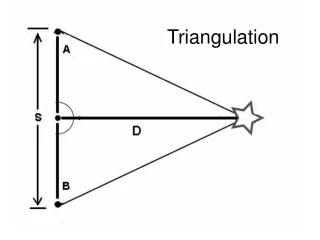
Triangulation 75% - 90% of recorded events are discarded
Proposal 1: Minimum perpendicular distance method • Method • Find the midpoint of the perpendicular between successive lines of response • Use the median of these midpoints to estimate the particle location in that time interval • Motivation • Avoid iteration by using the median to weight true pairs • Shortcoming • No guarantee that the closest approach is in the area of the tracer particle
Proposal 2: Density of lines • Method • Discretise the field of the view into a 3D grid. • Use the number of intersections of the LoRs with each grid element to isolate the particle position • Motivation • Discriminate against random and scattered events • Shortcoming • Computationally expensive
Proposal 2: Density of linesDino Giovannoni & Matthew Bickell (Physics Honours) From detected lines to line density… … to particle position. … to probability distributions…
Proposal 3: 2D triangulation • Method • Divide LoR into coplanar sets and use these to reduce the problem to a 2D one • Motivation • Simplify the 3D case into a 2D problem • Shortcoming • Drastically reduces the statistics • Does not discriminate between true and false lines.
Proposal 4: Distance distribution • Method • Use the current iterative method to calculate the centroid • Use the distribution of LoR distances from the centroid to dynamically determine the fraction to discard • Recalculate the centroid and repeat until some convergence criteria is met. • Motivation • Avoid having to calibrate the routine for each experiment • Shortcoming • Does not reduce the computational expense
Proposal 4: Distance distribution Frequency of events Distance from centroid /mm