Download
1 / 28
280 likes | 415 Views
Additional heuristics for improving vehicle performance. Additional heuristics for improving vehicle performance. Queuing strategies at hub terminals. Transition from reroutable to non-reroutable portion rule. Additional heuristics for improving vehicle performance.

E N D
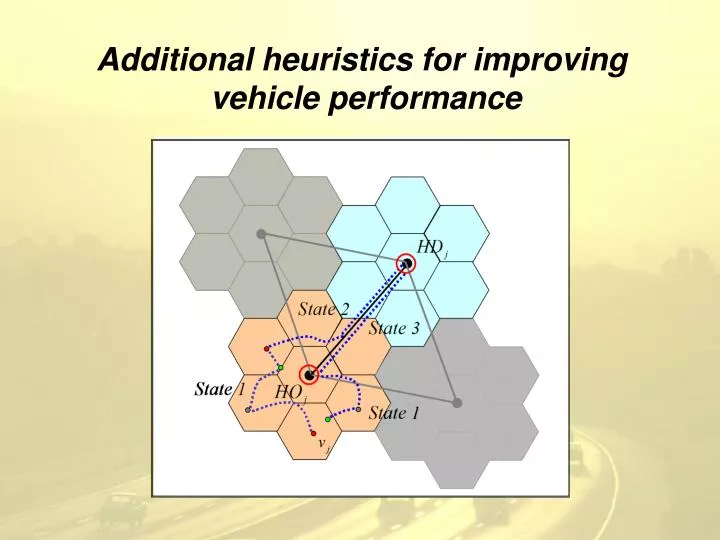
Additional heuristics for improving vehicle performance
Additional heuristics for improving vehicle performance Queuing strategies at hub terminals Transition from reroutable to non-reroutable portion rule
Additional heuristics for improving vehicle performance Default vehicle repositioning rule Indicator demand-capacity where Send vehicle to:
Simulation of Urban Transportation Networks with Multiple Vehicle Classes Deficiencies of current urban vehicle simulators in handling non-auto vehicle classes: • Transit • Taxi/Paratransit/DRT • Emergency fleet (Fire, Ambulance) • Commercial PD • Trucking/Packages THESE NON-AUTO VEHICLE CLASSES HAVE MUCH FEWER VEHICLES THAN AUTO-CLASS ADDED ONLY AS AFTER THOUGHTS INTO AUTO-BASED SIMULATION SCHEMES
Current Simulation’s Problems • Zone centroid based vehicle generation • Centroid based path finding (No point-to-point path generation) • Node to node travel of vehicles (No mid-links destinations) ALL BECAUSE THEY ARE DESIGNED FOR PERSONAL AUTOS LOOKED AT AS A CONTINUUM
Do Microsimulators solve the problem? • Increasily becoming viable for larger networks Commercial packages used more widely now • Paths, acceleration/deceleration, etc. vary across vehicles, but the MODELS ARE STILL FOR THE AUTO-CLASS. • Unlinked zone-to-zone trips • Generation models zonal (macroscopic) • Routing may vary individually, but ROUTING PHILOSOPHY dose not
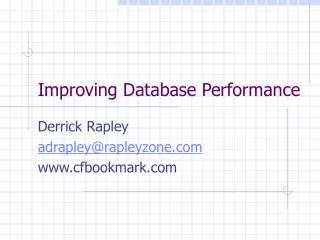
Paramics Data ABSNET data ABSNET Demand Paramics Every dt min L o o k u p T a b l e Link and turn costs Network conditions update Every event PT location Route decision Rules/SP Pick-up/Stop PT routes and stops Output Statistics PARAM-TRANSIT plataform
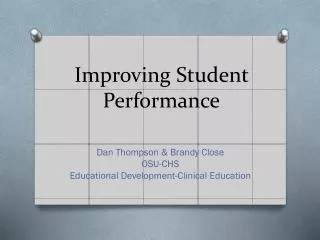
translation Simplified Network topology (ABSNET) Demand table Microscopic Network topology Network D.S. ROUTING & SCHEDULING RULES Network conditions update MICROSCOPIC SIMULATION MODEL Vehicle statistics Customer D.S. Call-back functions Transit veh. positions update Network conditions at micro level Transit fleet D.S. Communication Interface Service request Transit vehicle positions at micro level Vehicle enters trunk portion P.P.S.P. algorithm Transit vehicle reaches stop Stop is a hub TSP heuristics Cost comparison Delivery Pick-up Stop is customer location Users statistics Pax picked up or delivered Control functions Passenger dropped at hub Passenger picked-up at hub Stop operation at micro level • Stop time • Lane changing • Car following Set • Stop position • Stop time distribution Transit vehicle customer assignment Distribution of customers at hubs forming queues Route vehicles of type transit at micro level Route vehicles through updated paths
OCTAM ABSNET (Paramics)
Demand Generation module • OCTAM zones/demand have to be coded in Paramics • We will assume 2, 4, 8 % modal split • Identify on aggregate network the places where passengers are generated, uniform across links stretches associated with each zone - links translate to coordinate stretches - random numbers falling into the stretches
translation Simplified Network topology (ABSNET) Demand table Microscopic Network topology Network D.S. ROUTING & SCHEDULING RULES Network conditions update MICROSCOPIC SIMULATION MODEL Vehicle statistics Customer D.S. Call-back functions Transit veh. positions update Network conditions at micro level Transit fleet D.S. Communication Interface Service request Transit vehicle positions at micro level Vehicle enters trunk portion P.P.S.P. algorithm Transit vehicle reaches stop Stop is a hub TSP heuristics Cost comparison Delivery Pick-up Stop is customer location Users statistics Pax picked up or delivered Control functions Passenger dropped at hub Passenger picked-up at hub Stop operation at micro level • Stop time • Lane changing • Car following Set • Stop position • Stop time distribution Transit vehicle customer assignment Distribution of customers at hubs forming queues Route vehicles of type transit at micro level Route vehicles through updated paths
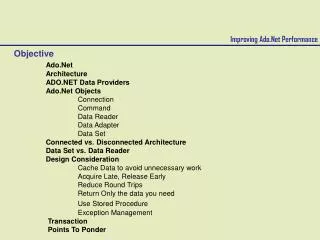
SIMULATION STATUS VEHICLE POSITION PARAMICS FUNCTIONS Vehicle Stop Terminal Normal Set hub position Set stop position Lane-changing vehicle_tagged_move move_in() gap_exists() vehicle_awareness _set() vehicle_aggression _set() T I M E ENTER DYNALINK Set link position Lane-changing Set site position Deceleration P - vehicle_speed_set() Site 1 Site 2 Speed = 0 Site 3 STOP = P vehicle_speed_set() Site 4 If Speed < 0 set Speed =0 P + Acceleration vehicle_tagged_ transfer() LEAVE DYNALINK Update
translation Simplified Network topology (ABSNET) Demand table Microscopic Network topology Network D.S. ROUTING & SCHEDULING RULES Network conditions update MICROSCOPIC SIMULATION MODEL Vehicle statistics Customer D.S. Call-back functions Transit veh. positions update Network conditions at micro level Transit fleet D.S. Communication Interface Service request Transit vehicle positions at micro level Vehicle enters trunk portion P.P.S.P. algorithm Transit vehicle reaches stop Stop is a hub TSP heuristics Cost comparison Delivery Pick-up Stop is customer location Users statistics Pax picked up or delivered Control functions Passenger dropped at hub Passenger picked-up at hub Stop operation at micro level • Stop time • Lane changing • Car following Set • Stop position • Stop time distribution Transit vehicle customer assignment Distribution of customers at hubs forming queues Route vehicles of type transit at micro level Route vehicles through updated paths
t 1 Single origin/single destination Shortest path algorithm Modified version of label correcting algorithm Initially • Modified iteration: Remove a node i from V. For each outgoing arc , if set and add j to V if it does not already belong to V
t j i 1 if Single origin/single destination Shortest path algorithm ujis a lower bound of SP from j to t purpose of entering j in V when its label is reduced is to generate shorter paths to t passing through j it is not necessary to consider those paths
Single origin/single destination Shortest path algorithm Advanced initialization: • Use all-pair SP matrix obtained for free-flow conditions
Original SP Final SP
Our algorithm Double-sided Dijkstra tree search
Summary and Final Remarks What does this all mean?? Current transit systems: $ 8.5 per trip 10-15 miles average trip • Current DRT system (occ. 1.0-1.3): $ 20 per trip • Taxi services: $ 30 per person trip (occ. 1.0) • HCPPT: $ 20 - 30 per trip (occ. 3.0-3.5) $ 7 per person trip with some subsidy: $ 4 per person trip
Summary and Final Remarks With appropriate designs, we can get efficiency in the HCPPT operations, as well as find the efficient solutions with real-time optimization. The system could be an ideal candidate for private/public operations with contracts to taxi-like companies. The technology for HCPPT is being re-demonstrated in ongoing projects (ADART).
Contribution System Design Operational Schemes/Control Simulation Model
High-Coverage Point-to-Point Transit System: A new design concept and simulation- evaluation of operational schemes Cristián E. Cortés: PhD Candidate Advisor: Professor R. Jayakrishnan January 2003 Department of Civil & Env. Engineering and Institute of Transportation Studies