Download
1 / 38
380 likes | 494 Views
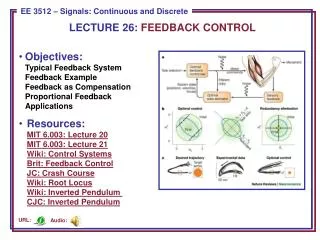
Lecture 26. Control of the Diver. In order for a diver to do what he or she does the diver applies effective torques at the joints. We want to find a recipe for doing this that will cause the simulated diver to execute the diver. This is a control problem.

E N D
Lecture 26. Control of the Diver In order for a diver to do what he or she does the diver applies effective torques at the joints We want to find a recipe for doing this that will cause the simulated diver to execute the diver This is a control problem
Tomorrow’s office hours will be 1:30 to 3:30 I have to leave at 3:30
We have a special case of nonlinear control here and I want to explore that, beginning with some discussion and then some simpler models
Suppose we want the solution of a second order system to follow some prescription We can write the second order system The error can be made to satisfy the homogeneous equation by the proper choice of f(t)
choose then is the desired error equation
This can be extended to a quasilinear system, which is what we typically have given this choice for f(t) converts the nonlinear equation to the linear form that yields a decaying error This is called feedback linearization
What are we doing here? We are asking that become and we choose the forcing function to make this happen This is cool, but it’s only 1D — what happens in a coupled system?
For the class of problems we are considering, which includes divers and some robots, we can choose the generalized coordinates such that each external force appears in only one reduced Hamilton equation This is not necessary, but it cleans up the algebra and I’ll assume we’ve taken the trouble to do that, so my simplest coupled case is
substitute into the system and solve for f1 and f2 When these are substituted back into the original equations we obtain
and if the system is not singular then the identical parenthetical equations must equal zero: the errors vanish asymptotically
This looks like magic, but it isn’t To make this work we have a necessary condition: as many forces as controlled variables There’re more, but I can’t give them all to you. It works for sufficiently simple systems with only revolute joints — divers and many robots (not the Stanford arm) I’d like to look at the inverted double pendulum from this perspective before moving on to more complicated systems
Planar inverted double pendulum: base fixed to the ground parameters: l1, l2 m1, m2 I treat them as slender members
We know how the double pendulum goes Six holonomic constraints to restrict it to the x = 0 plane Four connectivity constraints relating CMs to the ground Apply all ten constraints and define a two dimensional q
There are no additional constraints, so we can let qdot equal u We can find p and then the pieces of Hamilton’s equations
We have four differential equations and seven algebraic equations (We can actually look at these in the Mathematica notebook) The next issue is designing the control so by assigning we assign
We can look at various desired angles, both steady and time-dependent Here’s the algorithm for vertical stabilization
Here we ask both links to follow sinusoidal paths out of phase
Here are the torques required to perform the tracking shown on the previous slide
Three links —> 18 variables Confine to the x constant plane —> nine variables Four connectivity constraints —> five variables Number the links from the bottom to the top and select the middle link as the reference link
There are two torques — one at each joint — as shown in the sketch and we want to choose our variables accordingly
This is a fancy torque, suitable for 3D but of course only two of the components actually do anything The important thing is that the choice of q has isolated the two torques
Note that we have written this in terms of the desired qs, not the yi The next slide shows the development of the Zs and their gradients
We need the symbolic versions to build the equations we intend to integrate
The two internal angles start at zero, go to a maximum of 2π/3, and back to zero in the time interval tf Midway through the ends of the two outboard links should touch We can do this integration and see what the results are We can start by looking at the closest approach, when the two links are to touch
It is now probably worth looking at the Mathematica notebooks