Download
1 / 26
260 likes | 269 Views
Explore the evolution of the wireless control system at the Andros Lab, detailing original weaknesses, solutions, new improvements, and ongoing projects. Discover achievements in GUI development and a senior design project. Join the journey of innovation and progress in robotics technology.

E N D
Wireless Andros ROSELYNE BARRETO SPRING 2005 Imaging, Robotics, and Intelligent Systems Laboratory Department of Electrical and Computer Engineering, The University of Tennessee, Knoxville, TN.
OUTLINE • Wireless Andros • Review • Achievements • Work in progress • Literature Review on Autonomy • Conclusions • Future Work
WIRELESS ANDROS • Original Control System Consists of mechanical toggle switches, potentiometers, a four-position joystick, and a full analog two-axis joystick. The panel accepts user input, processes the signals, and transmits the data to the robot over a serial RS-232 cable.
WIRELESS ANDROS • Original Control System Main weaknesses: • Large and heavy • Mechanical • Connected to the robot through 150’ cable that can get caught in the robot’s tracks The size and weight of the robot added to the fact that the user has to constantly keep track of the cable make it hard to maneuver. The mechanical aspect makes it hard to upgrade. This last feature especially makes it impossible to have any autonomous function implemented on the robot.
WIRELESS ANDROS • Original Control System Solutions: • Software-based system: such system eliminates the dimensional problems since a program can be loaded on a small computer (tablet PC). Most importantly it is easier to upgrade and allows us to bring the robot to a higher level of technology and operation (semi-autonomy, homing, following…) • Wireless capabilities make the robot easier to maneuver by making sure there is no cable getting caught in the robot tracks
WIRELESS ANDROS • New control system The new control system includes an MFC program that sends RS 232 commands wirelessly to the robot. As of last semester it had 2 main limitations: • The last character of the 21-character command strings • The functionality of the program itself when sending strings
WIRELESS ANDROS • New control system • The last character of the command strings: this problem limited the control over the robot by making it hard to adjust. Although the characters changing with each body function were identified, without the correct check sum the string is invalid. Then the only way to access the settings (light, arm and vehicle speed, laser and weapons) was to create a database of command strings with all the possible settings.
WIRELESS ANDROS • New control system • The last character of the command strings: 0A000C2000908D80C0Æññ Check sum Fire weapon Laser Arm Speed Vehicle Speed Light Without the correct check sum the robot does not respond
WIRELESS ANDROS • New control system • The last character of the command strings
WIRELESS ANDROS • New control system • The last character of the command strings: this character is the sum of the ascii code of all preceding characters. This problem being fixed, the IRIS lab can now claim complete wireless control over the Remotec ANDROS with no restrictions • The new code is very flexible any character can be changed separately as long as the correct check sum is generated before sending the string no need for a database
WIRELESS ANDROS • New control system • Functionality problems: • First version: The user send a string with each button click. This technique is problematic because it is discontinuous. To try to send a continuous command the user has to keep clicking very fast on the buttons: not intuitive and not practical • Second version: The user start a timer that continuously sends a command to the robot but has to be careful and click another button to stop the timer before any damage is done to the robot or its surroundings: not intuitive and dangerous • Solution: The latest version of the GUI is safe and much more intuitive. The program sends a string as long as the user is pressing down on a specific button and stops sending the strings as soon as the user releases the button
WIRELESS ANDROS • New control system - Achievement : functional & flexible GUI Main window
WIRELESS ANDROS • New control system - Achievement : functional & flexible GUI Vehicle Drive
WIRELESS ANDROS • New control system - Achievement: functional & flexible GUI Settings Weapons
WIRELESS ANDROS • New control system – Work in progress Macros Set up
WIRELESS ANDROS – ECE 400 • Senior Design Project – Encoding carriage for sensor bricks Objective: This semester the senior design team 14 will build a device that will carry and track the motion of a sensor brick during a scanning process. The main idea is to design a brick carriage that is: • Adjustable to different size bricks if necessary • Equipped with a encoding system that will keep track of the brick during scans • Maneuverable by either of the Remotec ANDROS robots Status: The design has been accepted. Team 14 will order parts this week and start building after the break
WIRELESS ANDROS • New control system – Work in progress • Review on Autonomy – Objective • Extend and improve my last semester review on autonomy • Focus on finding one method to implement an autonomous ANDROS (ANDIBOT: Autonomous Navigation and Directed Imaging Robot)
WIRELESS ANDIBOT • New control system – Work in progress • 3 options for autonomous ANDROS (ANDIBOT) • Robot gets to a car or other target autonomously and an operator performs the inspection • Operator gets the robot to the car and the robot does the inspection autonomously • Robot gets to the car and performs the inspection autonomously and operator only intervenes if something goes wrong (ideal)
WIRELESS ANDIBOT • New control system – Work in progress • Robots gets to the car autonomously (focuses on navigation) • Use of range sensor + odometry for obstacle avoidance and localization • Use of visual sensor (visual homing) + odometry: wide panoramic fields of view and landmarks + odometry but no obstacle avoidance here Note: You may ask: if the operator has to take over when the robot gets to the car, why can’t he/she just drive the robot to the target? May be to capture images and bring them back to the operator’s station.
WIRELESS ANDIBOT • New control system – Work in progress • Robot performs the inspection autonomously • Use of range sensor and odometry for obstacle avoidance and localization • Focus on the arm, the robot may be “safe” but the arm could still collide with its surroundings. Even on the current system Remotec insists that the operator keeps a safe zone around the robot when he/she cannot see it because someone may get hurt or the robot may damage objects (car to be inspected)
WIRELESS ANDIBOT • New control system – Work in progress • Robot get to the car and performs the inspection autonomously • Obviously this option combines the 2 previous cases and presents the most challenges
WIRELESS ANDIBOT • Facts about implementing ANDIBOT • Autonomous robots usually use odometry to move a certain distance in a certain direction, then sensory information constantly verifies their actual position • New approaches use visual sensors for homing => suitable for navigation not so much for tasks oriented missions • String commands contain information regarding directionand speed and could be use to calibrate ANDIBOT’s motion instead of an encoder and I would just need a sensor to verify the robot’s position. (Note: ANDROS is already built and without encoders) • Problem: battery
Conclusion • The IRIS Lab can now claim complete wireless control over the Remotec ANDROS Mark V - All the functions can be implemented and all the settings can be accessed including the weapons which could be used for sensors • The work on ANDIBOT 1 can now shift from trying to mimic the original control box to adding new functionality to the robot • The main focus for new functionality will be autonomy. The robot being the equivalent of a mobility brick able to carry sensors for vehicle inspections
Future Work • Task 1 - ECE504 Probability and Random Processes • Task 2 - Wireless ANDIBOT – Research sensors and think about possible implementations. • Task 3 - Literature survey on Autonomy • Task 4 - Supervise ECE 400 Senior Design Team 14
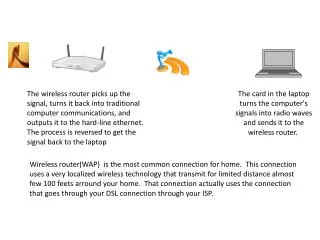
THANK YOU !!! Questions?