Download
1 / 31
320 likes | 489 Views
710.088 ROBOT VISION („Messen aus Bildern“) 2VO 1KU Matthias Rüther. Kawada Industries Inc. DLR. Organization. VO : Tuesday 14:15-15:45 Seminarraum ICG Exam: Written Exam Oral Exam if Requested KU:implementation of lecture topics in the real

E N D
710.088 ROBOT VISION(„Messen aus Bildern“) 2VO 1KUMatthias Rüther Kawada Industries Inc. DLR
Organization VO: Tuesday 14:15-15:45 Seminarraum ICG Exam: Written Exam Oral Exam if Requested KU:implementation of lecture topics in the real world (on the lab-robots) Groups of three students Possible problems on the last slide Scheduling of topics: 8.3.2005 If you are interested: excursions to industrial vision companies (Alicona Imaging, M&R)
Time Table 1.3. : Introduction and Overview 8.3. : Projective Geometry (1) 15.3. : Projective Geometry (2) 12.4. : Projective Geometry (3) 19.4. : Projective Geometry (4) 26.4. : Camera Technologies 3.5. : Shape From X (1) 10.5. : Shape From X (2) 24.5. : Shape From X (3) 31.5. : Robot Kinematics (1) 7.6. : Robot Kinematics (2) 14.6. : Tracking of Moving Objects 21.6. : Visual Servoing / Hand Eye Coordination
Literature • Sciavicco, L., Siciliano, B., Modelling and Control of Robot Manipulators 2nd Ed., Springer, 2000 • Ballard D.H., Brown C.M., "Computer Vision", Prentice-Hall, 1982 • Sonka M., Hlavac V., Boyle Image Processing, Analysis and Machine Vision, Chapman Hall, 1998 • Nalva V.S., "A Guided Tour of Computer Vision", Addison-Wesley Publishing Company, 1993 • Horn B.K.P., "Robot Vision", MIT Press, Cambridge, 1986 • Shirai Y., "Three- Dimensional Computer Vision", Springer Verlag, 1987 • Faugeras O., Three-Dimensional Computer Vision A Geometric Viewpoint, MIT Press, 1993 • Hartley R., Zissermann A., Multiple View Geometry in Computer Vision, Cambridge, 2001.
Robotics • What is a robot? "A reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices through various programmed motions for the performance of a variety of tasks" Robot Institute of America, 1979 … in a three-dimensional environment. • Industrial • Mostly automatic manipulation of rigid parts with well-known shape in a specially prepared environment. • Medical • Mostly semi-automatic manipulation of deformable objects in a naturally created, space limited environment. • Field Robotics • Autonomous control and navigation of a mobile vehicle in an arbitrary environment.
Robot vs Human • Human advantages: • Intelligence • Flexibility • Adaptability • Skill • Can Learn • Can Estimate • Robot Advantages: • Strength • Accuracy • Speed • Does not tire • Does repetitive tasks • Can Measure
Robotics: Goals and Applications • Robotics does not intend to develop the artificial human! [Whitney, D. E., Lozinski, C. A. and Rourke, J. M. (1986) Industrial robot forward calibration method and results.] • Goal: combine robot and human abilities. • Applications: • Automation (Production) • Inspection (Quality control) • Remote Sensing (Mapping) • Man-Machine interaction („Cobot“) • Robot Companion (Physically challenged people) • See [Brady, M. et. al. (eds). „Robot Motion: Planning and Control“]
What can Computer Vision do for Robotics? • Accurate Robot-Object Positioning • Keeping Relative Position under Movement • Visualization / Teaching / Telerobotics • Performing measurements • Object Recognition (see LV „Bildverarbeitung u. Mustererkennung“, „Bildverstehen“, „AK Computer Vision“) • Registration Visual Servoing
Combining Computer Vision and Robotics high Motion Planning: Given a known world and a cooperative mechanism, how do I get there from here ? Localization: Given sensors and a map, where am I ? Vision: If my sensors are eyes, what do I do? Mapping: Given sensors, how do I create a useful map? Bug Algorithms: Given an unknowable world but a known goal and local sensing, how can I get there from here? Abstraction level Kinematics: if I move this motor somehow, what happens in other coordinate systems ? Control (PID): what voltage should I set over time ? low Motor Modeling: what voltage should I set now ?
Computer Vision • What is Computer Vision? "Computer Vision describes the automatic deduction of the structure and the properties of a (possible dynamic) three-dimensional world from either a single or multiple two-dimensional images of the world" [Nalva VS, "A Guided Tour of Computer Vision"] • Measurement • Measure shape and material properties in a 3D environment. Accuracy is important. • Recognition • Cognitive systems interpret a 3D environment (object classification, categorization). Systems are allowed to fail to a certain extent (similar to humans). • Navigation • Navigation Systems orient themselves in a 3D environment. Robustness and time are important.
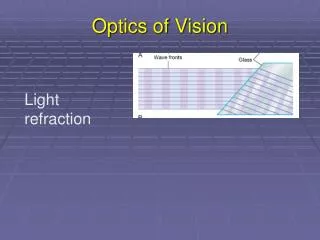
Measurement • „Shape from X“ techniques measure shape properties of objects from 2D digital images. • Shape from Stereo: two cameras obeserve an object from different viewpoints (similar to human eye). • Shape from focus: limited depth of focus allows to measure object-camera-distance. • Shape from structured light: a light pattern is projected on the object, the pattern deformation gives shape information. • Shape from Shading: an object is illuminated from a single direction. Light reflection depends on object shape and follows a reflectance function.
Shape from Structured Light • Structured Light Sensor Figures from PRIP, TU Vienna
Navigation • SLAM: Simultaneous Localization and Mapping. • Where am I on my map? • If the place is unknown, build a new map, try to merge it with the original map. • Visual Odometry: calculate the relative motion of the camera between two frames. Summing up the motion gives the camera path. Error propagation! • Visual Servoing: move to / maintain a relative position between robot end effector and an object. • Tracking: continuously measure the position of an object within the sensor coordinate frame.
SLAM Mapping:
SLAM The final map:
SLAM Navigation:
Registration • Registration of CAD models to scene features: Figures from P.Wunsch: Registration of CAD-Models to Images by Iterative Inverse Perspective Matching
KU: Student Problems • Shape from Stereo 3 students • Shape from Focus 3 students • Shape from Structured Light:Laser 3 students • Shape from Structured Light:Pattern 3 students • Shape from Shading 3 students • Robot Kinematics 3 students • 2D Grip Planning 2..3 students • 2D Visual Servoing 3 students • 2D Tracking 3 students • Registration / Model Fitting 3 students • Visual Odometry + Randomized RANSAC 3 students