Download
1 / 1
10 likes | 110 Views
Wireless Assistive Control System: P08027.

E N D
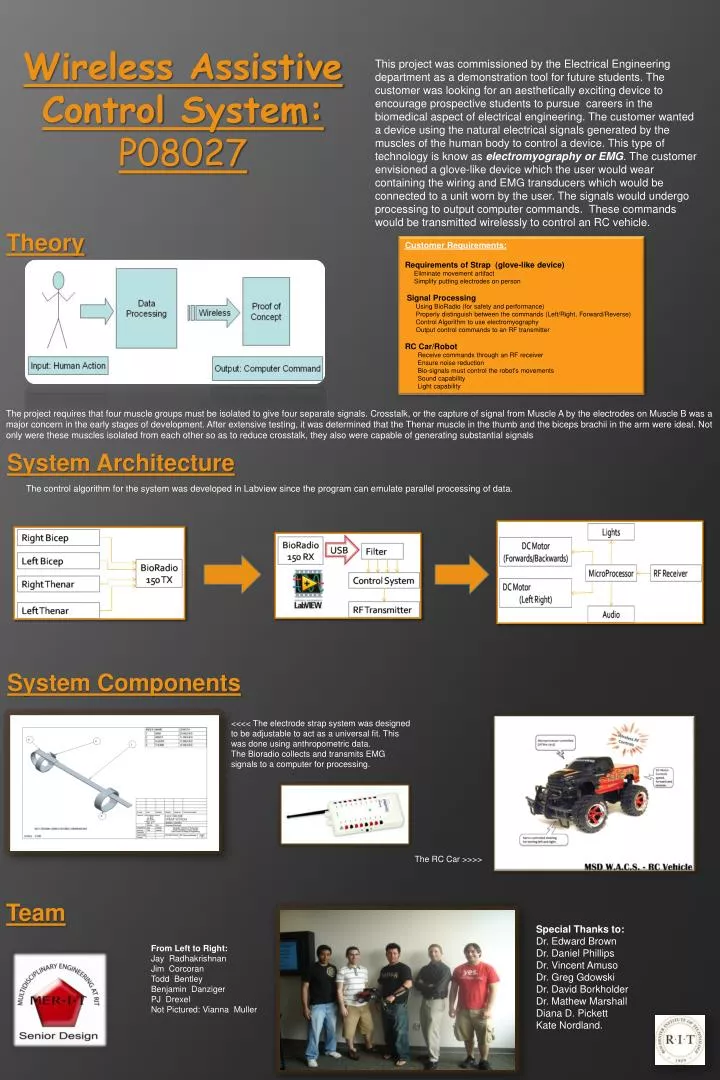
Wireless Assistive Control System: P08027 This project was commissioned by the Electrical Engineering department as a demonstration tool for future students. The customer was looking for an aesthetically exciting device to encourage prospective students to pursue careers in the biomedical aspect of electrical engineering. The customer wanted a device using the natural electrical signals generated by the muscles of the human body to control a device. This type of technology is know as electromyography or EMG. The customer envisioned a glove-like device which the user would wear containing the wiring and EMG transducers which would be connected to a unit worn by the user. The signals would undergo processing to output computer commands. These commands would be transmitted wirelessly to control an RC vehicle. Theory • Customer Requirements: • Requirements of Strap (glove-like device) • Eliminate movement artifact • Simplify putting electrodes on person • Signal Processing • Using BioRadio (for safety and performance) • Properly distinguish between the commands (Left/Right, Forward/Reverse) • Control Algorithm to use electromyography • Output control commands to an RF transmitter • RC Car/Robot • Receive commands through an RF receiver • Ensure noise reduction • Bio-signals must control the robot's movements • Sound capability • Light capability The project requires that four muscle groups must be isolated to give four separate signals. Crosstalk, or the capture of signal from Muscle A by the electrodes on Muscle B was a major concern in the early stages of development. After extensive testing, it was determined that the Thenar muscle in the thumb and the biceps brachii in the arm were ideal. Not only were these muscles isolated from each other so as to reduce crosstalk, they also were capable of generating substantial signals System Architecture The control algorithm for the system was developed in Labview since the program can emulate parallel processing of data. System Components <<<< The electrode strap system was designed to be adjustable to act as a universal fit. This was done using anthropometric data. The Bioradio collects and transmits EMG signals to a computer for processing. The RC Car >>>> Team Special Thanks to: Dr. Edward Brown Dr. Daniel Phillips Dr. Vincent Amuso Dr. Greg Gdowski Dr. David Borkholder Dr. Mathew Marshall Diana D. Pickett Kate Nordland. From Left to Right: Jay Radhakrishnan Jim Corcoran Todd Bentley Benjamin Danziger PJ Drexel Not Pictured: Vianna Muller