Download
1 / 7
130 likes | 405 Views
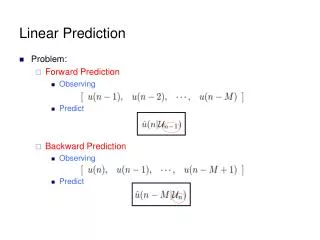
7. OPTIMUM FILTERS 7.2.2 Linear Prediction. 발표자 : 손 천 돈 발표일자 : 2006.10.12. 7. 2.2 Linear Prediction : 현재의 신호값 과 이전 신호값들의 Linear combination 을 이용하여 다음 신호값인 을 예측하는 것이다. FIR linear predictor of order p-1:.

E N D
7. OPTIMUM FILTERS7.2.2 Linear Prediction 발표자: 손 천 돈 발표일자: 2006.10.12 창원대학교 제어계측공학과 자동제어 실험실
7.2.2 Linear Prediction : 현재의 신호값 과 이전 신호값들의 Linear combination을 이용하여 다음 신호값인 을 예측하는 것이다. • FIR linear predictor of order p-1: 이 때 (p-1)은 FIR Linear predictor의 차수, w(n)은 예측 필터의 계수 창원대학교 제어계측공학과 자동제어 실험실
Linear predictor는 위의 그림에서 d(n)=x(n+1)을 이용하여 wiener • filtering form으로 바꾸어 표현 할수 있고 wiener-hopf equation을 • 설정하기 위하여 d(n)과 x(n) 사이의 cross-correlation 관계를 구하면, 창원대학교 제어계측공학과 자동제어 실험실
The Wiener-Hopf equations for optimum linear predictor Stochastic autocorrelation Prony all-pole normal equation Deterministic autocorrelation The two sets of equations are same except for • The mean-square error 창원대학교 제어계측공학과 자동제어 실험실
Example 7.2.2 Linear Prediction Autocorrelation sequence: First-order predictor: <Solving Wiener-Hopf equation> X(n+1)의 예측에는 ,x(n-1)이 사용되지 않았으므로 은 white noise process이다. 그래서 이전의 으로 예측할수 없다. 따라서 기대치를 사용. =0 창원대학교 제어계측공학과 자동제어 실험실
The mean-square linear prediction error 가 증가하면 도 증가하고 은 감소한다. For an uncorrelated process, =0 창원대학교 제어계측공학과 자동제어 실험실
Noise 은 signal 상관없다. 단지 가 바뀌었다., • 실제적인 모델에서 노이즈-v(n)가 포함된 경우 noise Winener-Hopf Eq. Vector Cross-Correlation 창원대학교 제어계측공학과 자동제어 실험실