Download
1 / 17
190 likes | 375 Views
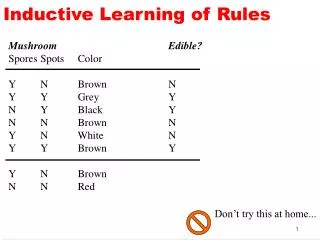
Automated Visual Inspection Using Inductive Learning. Visual Inspection. Product reliability is of maximum importance in most mass-production facilities. 100% inspection of all parts, subassemblies, and finished products.

E N D
Visual Inspection • Product reliability is of maximum importance in most mass-production facilities. • 100% inspection of all parts, subassemblies, and finished products. • Therefore, the inspection process is normally the largest single cost in manufacturing. • Most difficult task for inspection is that of inspecting for visual appearance. • Visual inspection seeks to identify both functional and cosmetic defects. • Visual inspection in most cases depends mainly on human inspectors. Automated Visual InspectionUsing Inductive Learning
Automated Visual Inspection • Human inspectors are slow compared to modern production rates, and they make many errors. • Automated visual inspection (AVI) is obviously the alternative to the human inspector. • Several practical reasons for automated inspection include: • Freeing humans from dull and routine. • Saving human labor costs. • Performing inspection in unfavorable environments. • Reducing demand for highly skilled human inspectors. • Analyzing statistics on test information and keeping records for management decisions. • Matching high-speed production with high-speed inspection. Automated Visual InspectionUsing Inductive Learning
Visual Inspection Techniques • Therearemanytechniquesforautomatedvisualinspection: • Image subtraction: • The inspected image to be is scanned and compared against the original image, which has been stored before. • The subtracted image is analyzed. • This method needs large reference data storage, accurate alignment, sensitive lighting and scanner conditions. • Also many images may not match point-by-point identically even when they are acceptable. • Dimensional verification: • The distance between edges of geometric shapes is the primary feature of this inspection method. • The task is to make a determination for each measurement as to weather it falls within the previously established standards. Automated Visual InspectionUsing Inductive Learning
Visual Inspection Techniques (cont.) • Syntactic approach: • Uses descriptions of a large set of complex objects using small sets of simple pattern primitive and structural rules. • Primitives are small number of unique elements, as lines or corners. • A structural description of the primitives and the relationships between them can be determined to form a string grammar. • Feature (Template) Matching: • Theinspectedimageisscannedandtherequiredfeaturesareextracted. • Then these features are compared with those defined for the perfect pattern. • This method greatly compresses the image data for storage and reduces the sensitivity of the input intensity data. • A number of predefined binary templates can be used to extract the necessary features for images to be inspected. Automated Visual InspectionUsing Inductive Learning
Template Matching Technique • Mask technique can be used, with number of predefined binary templates, to extract the necessary features for inspected images. • The total number of 3x3 mask templates is 28. • This number is calculated as follows: • The total number of black pixels in each mask is 3. • The reason of using 8 is that, the central pixel is always black. • The rest of 8 pixels only 2 pixels can be black and the rest must be white. Number of masks = Automated Visual InspectionUsing Inductive Learning
28 of 3x3 Masks Automated Visual InspectionUsing Inductive Learning
Template Matching Technique (cont.) • The reason for choosing 3x3 masks is to reduce the processing time. • It is possible to have 5x5, 7x7 or some other masks. • If the size of the mask is bigger the accuracy may increase but the processing time will also increase. • All 28 masks may not always be required to use for the applications. • The experience from many applications shows that, 10 to 15 masks are good enough to be employed. • How to select the suitable masks for each application is an important problem. Automated Visual InspectionUsing Inductive Learning
28 of 3x3 Masks R R R R R R R R R R R Automated Visual InspectionUsing Inductive Learning
20 of 3x3 Masks Automated Visual InspectionUsing Inductive Learning
Mask Selection • In order to select a proper number of masks, the following steps can be considered : • Select a number of example images. • Apply 28 masks and calculate the frequency of each. • Find the average frequency of each mask. • Sort the masks according to their average frequencies (from biggest to smallest). • Choose a number of them for the application. • Each mask must be applied to each image pixel-by-pixel from left to right and from top to bottom. • The frequencies may change from one image to another. • We can take the average of all frequencies for the same mask and consider it for selection. Automated Visual InspectionUsing Inductive Learning
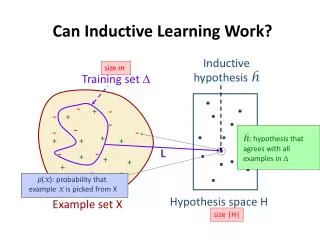
Inductive Learning • Induction can be considered as the process of generalizing a procedural description from presented or observed examples. • Inductive inference is the method of moving from specific examples to general rules. • One of the visual pattern recognition goals is developing a system that can learn to classify patterns. • First, the system should be trained using a set of training examples. • Then it should use knowledge gained in the training session to automatically classify new examples. Automated Visual InspectionUsing Inductive Learning
Training Session • A training process proceeds follows: • A number of good parts (examples) are shown to the system. • The frequencies of 20 3x3-masks are calculated. • Then an induction algorithm is used to extract the necessary rules. • The extracted set of rules represents the good parts. • When a pattern is shown to the system, using the extracted rules, it can decide whether it is good. • If the pattern cannot be decided as good it means that the pattern is bad (defected). • The system does not need to learn bad patterns. Automated Visual InspectionUsing Inductive Learning
Example Application • Five types of cups were selected. • The pattern is scanned pixel by pixel from left to right and from top to bottom using the 20 masks in order to calculate the frequency of each mask. • For example, the frequencies for Cup-l were calculated as follows: 112, 1423, 31, 27, 56, 55, 57, 56, 262, 267, 265, 261, 195, 196, 197, 201, 5, 5, 208, 218, Cup-l • Inspection of water glass cups: Automated Visual InspectionUsing Inductive Learning
Example Application (cont.) • Set of examples for the five cups: • 112, 1423, 31, 27, 56, 55, 57, 56, 262, 267, 265, 261, 195, 196, 197, 201, 5, 5, 208, 218, Cup-1 • 622, 840, 27, 39, 155, 154, 162, 158, 102, 104, 103, 101, 31, 29, 34, 36, 26, 28, 107, 111, Cup-2 • 230, 621, 37, 40, 22, 22, 22, 22, 116, 109, 109, 116, 18, 18, 19, 19, 45, 45, 18, 18, Cup-3 • 697 ,715, 2, 1, 10, 10, 10, 10, 91, 94, 91, 94, 10, 11, 9, 11, 4, 3, 1, 2, Cup-4 • 3739, 622, 72, 77, 557, 575, 560, 579, 144, 155, 154, 138, 521, 533, 523, 533, 542, 543, 110, 113, Cup-5 Automated Visual InspectionUsing Inductive Learning
Example Application (cont.) • Rule 1 • IF 112 =< Ml < 303 AND 1395 =< M2 < 1438 AND 30 =< M3 < 34 AND 25 =< M4 < 29 AND 39 =< M5 < 68 AND 179 =< MI6 < 207 AND 218 =< M20 < 230 THEN CLASS IS Cup-1 • Rule 2 • IF 494 =< M1 < 685 AND 836 =< M2 < 879 AND 26 =< M3 <30 AND 37 =< M4 < 41 AND 155 =< M5 < 184 AND 130 =< M8 < 160 AND 100 =< M9 < 109 THEN CLASS IS Cup-2 • Rule3 • IF 112 =< M1 < 303 AND 621 =< M2 < 664 AND 34 =< M3 < 38 AND 37 =< M4 < 41 AND 10 =< M5 < 39 AND 33 =< M17 < 62 AND 32 =< M18 < 61 THEN CLASS IS Cup- 3 • Rule 4 • IF 685 =< Ml < 876 AND 707 =< M2 < 750 AND 2 =< M3 < 6 AND 1 =< M4 < 5 AND 10=< M5 < 39 AND 91 =< M11 < 101 AND 2 =< M20 < 14 THEN CLASS IS Cup-4 • Rule 5 • IF 3550 =< M1 < 3741 AND 621 =< M2 < 664 AND 70 =< M3 < 74 AND 73 =< M4 < 77 AND 532 =< M5 < 561 AND 526 =< M17 < 555 AND 525 =< M18 < 554 THEN CLASS IS Cup-5 Automated Visual InspectionUsing Inductive Learning
Visual Inspection Applications • Automated visual inspection has very large application areas: • Banknote recognition • Signature recognition • Fingerprint recognition • Number-plate recognition • Barcode recognition • Inspection of all parts, subassemblies, and finished products in mass production. Automated Visual InspectionUsing Inductive Learning