Download
1 / 26
260 likes | 408 Views
Use of Aerial Views in Remote Ground Vehicle Operations. Roger A. Chadwick New Mexico State University Department of Psychology Douglas J. Gillan (PI). Remote Ground Vehicles. The ARMY is developing remotely operated semi-autonomous ground vehicles for their future forces.

E N D
Use of Aerial Views in Remote Ground Vehicle Operations Roger A. Chadwick New Mexico State University Department of Psychology Douglas J. Gillan (PI)
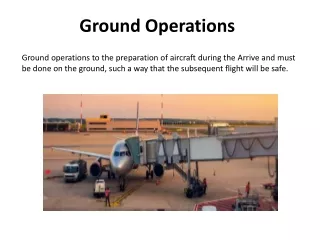
Remote Ground Vehicles • The ARMY is developing remotely operated semi-autonomous ground vehicles for their future forces.
Unmanned Ground Vehicles • Two major classes of vehicle • UGV = unmanned ground vehicle • SUGV = small unmanned ground vehicle Unmanned ground vehicle Small unmanned ground vehicles
Use of SUGV in IRAQ • 25th Army Science Conference briefing. • Soldiers are currently using SUGVs in pre-assault of urban dwellings and caves. • SUGVs used to clear IEDs from roadways.
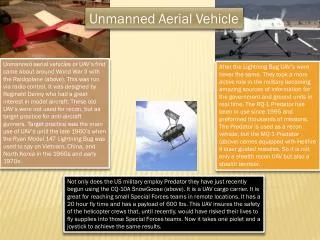
UAVs • Unmanned Aerial Vehicles • Small UAVs planned for wider use. • Switch-blade movie
UGV and UAV operations • It makes sense to some military planners to combine UGV and UAV information. • Also, consider combining UGV imagery with maps or satellite images.
Problems with UGV operations • Propose that spatial disorientation is always a problem in operation of these vehicles. • Previous studies reveal much difficulty matching ground viewed objects to aerial views. • Will use of aerial views assist?
actual target marked target Target Localization (previous study) • Common localization error: wrong corner
Integrating Air and Ground Views Task: Find ground target in Air-view
Integrating Air and Ground Views • Many errors are in depth.
Experiment Method • UGV tele-operated search mission with manipulation of aerial view. • Air view conditions (between subjects) • 1) no air view • 2) “free” auto-tracked air view • 3) operator simple point and click air view • 4) operator cognitive loaded point and click air view (solve 2 digit addition problem)
Procedure • Consent • Training in mini-rover operation • Pre-test (timed relay run in practice area) • Measure time to complete (RT) • Measure number of faults (FAULTS) • Pre-test (bridge crossing) • Measure time to complete (RT) • Measure number of tries (FAULTS) • Subjective skill level rated (-3 to +3) • Experimenter rates participant skill after pretests
Procedure (continued) • Search mission instructions • Search Area A then Area B • Counterbalanced areas • Find as many targets (people) as possible in 10 minutes and accurately mark their locations on the map display. • Targets marked by clicking on map (rt click)
Stimuli • Miniature model environment. 2 separate areas.
Targets • Well hidden miniature soldier figures. • 8 targets per area
Maps • Area A difficult terrain, limited possible paths • Area B, many possible routes and relatively easy driving. Area A Area B
Results • 54 participants ran experiment • 40 valid participants analyzed • Several failed to pass pre-test bridge criteria (>15 attempts to cross) • Several technical glitches • Preliminary analysis presented • Need to regress on pre-test skill measures • Skill of participants varies considerably
Results: Faults • Faults (robot flipping or getting stuck) • No significant difference across conditions
Results: Targets Found • Air-view mode, p = .176, GLM Univariate (preliminary) N = 40 Participants
Results: Targets and Skill • Targets found as function of subjective skill rating of participant.
Results: Target Localization • Pixel offset from actual to marked target L. Error F(3,83) = 4.1 P < .01
Localization Error and Skill • Subjective skill appears to correlate with Target localization measure.
Conclusions • Once again, operator skill variability is a big problem with statistical power in these type of experiments. • Auto-track aerial view is most beneficial. • Cognitive demands of operator controlling air view result in some loss of performance compared to auto-track. • Fewer targets found with operator controlled air view compared to control (no air-view) group.