Download
1 / 23
230 likes | 239 Views
This presentation outlines the research background, development process, experiments, and future applications of a wearable 6-D force sensor for analyzing human dynamics. It covers the prototype design, sensor structures, calibration mechanism, and measurement of ankle joint moments. The presentation also mentions recent developments in wearable force sensors and related products. The sensor is capable of measuring forces in six dimensions and can be used for various applications in human dynamics analysis. The presentation concludes with a demonstration of the new sensor and interface software.

E N D
Development of a Wearable 6-D Force Sensor for Human Dynamics Analysis Tao LIU Department of Intelligent Mechanical Systems Engineering Kochi University of Technology, Japan 9, Nov, 2004
Outline of the Presentation • Research Background • Development of A Sensor Prototype • Experiments • In the Future
Human segments dynamic analysis model Wearable six-dimension force sensor Wearable inertial sensor (Gyro and Accelerometer) M3 hip joint M2 knee joint M1 ankle joint
Muscle model Human segments dynamic analysis model Wearable six-dimension force sensor Wearable inertial sensor (Gyro and Accelerometer) M3 hip joint M2 knee joint M1 ankle joint
Last Application about wearable sensors and actuators Berkeley lower Extremity exoskeleton, USA 2004 University of Tuskuba, Japan 2004
Last Research and Product on Wearable Force Sensors University of Tokyo Six-axis Sensor NITTA corporation (Insole Pressure Sensor)
Outline of the Presentation • Research Background • Development of A Sensor Prototype • Experiments • In the Future
Two kinds of structures in sensor design Moment Moment Force Force Load-cell Sensor with Serial Support Mechanism Sensor with Parallel Support Mechanism
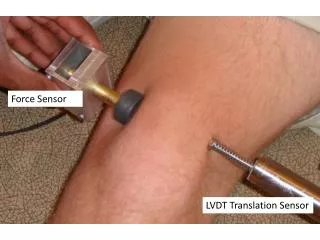
Theory of the sensor 60 X axis Load-cell Hard ball Z axis Load-cell 140 Y Y axis Load-cell Z X TopPlane BottomPlane
171mm Fz Mz 105mm Mx My Fx Fy 26.5mm X, Y, Z Max force: 100N, 100N,1000N Max moment: 50Nm
Outline of the Presentation • Research Background • Development of A Sensor Prototype • Experiments • In the Future
Calibration Mechanism Load cell Drag force Pulley weight
least-squares method in MATLAB Function: polyfit() Vertical axis: weight mass (kg) Horizontal axis: strain of strain gages
Outline of the Presentation • Research Background • Development of A Sensor Prototype • Experiments • In the Future
Z Z Z X X X Y Y Y Measurement of ankle joint moment in heel strike phase Sensor with single plane Sensor with double plane Ankle joint Heel 3D force sensor Ground Reference coordinate
1000N 1000N 1000N