Download
1 / 20
200 likes | 309 Views
Linear Systems (ENGR 365) Messiah College Spring 2006. Dr. Harold R. Underwood Assoc. Prof. of Engineering & Physics F225 / x7125 / HUnder@messiah.edu Classes: F156 / Labs: F166 and F254. Preface to Linear Systems. Signals Without them, systems would be worthless Examples*

E N D
Linear Systems (ENGR 365)Messiah CollegeSpring 2006 Dr. Harold R. Underwood Assoc. Prof. of Engineering & Physics F225 / x7125 / HUnder@messiah.edu Classes: F156 / Labs: F166 and F254
Preface to Linear Systems • Signals • Without them, systems would be worthless • Examples* • Speech & Images as in face-to-face human communication • Email & text msgng as in distant electronic communication • Heartbeat (ECG), Brainwaves (EEG) and Blood Pressure for medical monitoring of patient health • Temperature, Atmospheric Pressure, Humidity, Wind Speed & Direction as in weather forecasting • Deep Space Probe sending remote sensing data • Definition of a signal*: a function of one or more variables that conveys information on the nature of a physical phenom. *Haykin & Van Veen. Signals & Systems, 2/e. Wiley, Hoboken, NJ: 2005.
Preface to Linear Systems • Systems • Less detail about individual devices • More about • Behavior of the overall network of connected devices • Approaches applicable to such networks, especially in Discrete Time (DT), intentionally emphasized in this course • Characteristics that further our engineering goals of analysis and design
Preface to Linear Systems • What is a system? • Generates a signal or extracts information • Human speech comm. (natural or artificial) • Generation: vocal tract or electronic speech synthesis • Recognition: ears / auditory pathways / brain or automatic speech recognition system (ASRS) • Purpose: depends on the application • ASRS may be to recognize or identify speaker • Elect. Comm. Syst. to transport information reliably • Aircraft Landing System to keep it on the runway centerline • Definition*: an entity that manipulates one or more variables to accomplish a function, thereby yielding new signals. * Haykin & Van Veen
Preface to Linear Systems • Linear • What are the advantages? • Faithful (undistorted) reproduction • Scalable (multiplication applies) • Summable (addition property applies) • Disadvantages? • Some practical systems do not satisfy these properties. HOWEVER,nonlinear systems may sometimes be treated as approximately linear within appropriate limits.
Preface to Discrete Time (DT) Systems • Discrete Time: a system whose input and output progress over uniform time increments only • Examples • Financial Investments (e.g., daily stocks, etc.) • Digital Electronics driven by a clock oscillator • Personal Computer (PC with general processor) • Digital Signal Processor (DSP dedicated device)
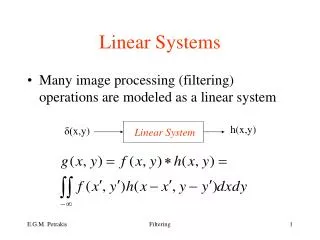
Introduction to Linear Systems • Include both analog and digital versions • Analog (continuous time functions) • Digital (discrete time functions: sequences) • Digital versus Analog signal processing • Analog methods: Traditional, Simpler and Directly compatible with analog signals • Digital methods: • Flexibility: hardware may be reprogrammed for new applications rather than reconstructed • Repeatability: not subject to parameter variations
Introduction to Linear Systems • Why does ENGR 365 emphasize digital? • To better understand and exploit the power of digital signal processing methods • Brings better balance to your electrical or computer concentration: already dealt (or will deal) with analog linear systems in Circuits, Exp. Methods, Devices and Control Systems (e.g., use Laplace Transform as network transfer function)
Engineering Fields of Significant Applications* • Communications Systems • Control Systems • Micromechanical (MEMS) Systems • Remote Sensing • Biomedical Signal Processing • Auditory Systems • Others * Haykin & Van Veen provides background on each of these.
Communication Systems • Basic elements: • Transmitter • Channel • Receiver • Typical Processes • Analog: modulation & demodulation • Digital: sampling, quantization, coding & sig. est. • Error Detection & Correction (EDC): channel encoder & decoder to combat noise effects
Control Systems • Basic elements: • Controller (often a digital computer) • Plant (vehicle, factory, robot, tool, etc.) • Sensors (GPS, temp., pressure, etc.) • Process: closed-loop feedback • Purpose • Regulate output response by a ref. input • Combat the effect of disturbances on output
Other Examples • MEMS: lateral capacitive accelerometers in the design of a gyroscope system • Remote Sensing: synthetic aperture radar (SAR) to obtain high resolution images via FFT • Biomedical Processing: filtering to remove instrumental, biological, or analysis artifacts from signals of interest such as ECG, EEG, or other • Auditory System: complex means of sensitive frequency and volume discrimination from which to learn (model for artificial speech recognition)
Value of the Transfer Function in Each Field of Application • H = Y / X in the transform domain • Relates 3 fundamental quantities: if we know two, we can find the third! • If the system is a filter (ECS, BSP, etc.) • Know characteristics of the system (H) • Have a known (currupted?) input (X) • Can find the output simply since Y = H•X (in the transform domain)
Value of the Transfer Function in Each Field of Application • If our system is a bio-potential measurement probe, or sensor • Know characteristics of the probe or sensor if it is well calibrated (H) • Have a known electronic output signal (Y) • Desire the probe or sensor input (X) represents the measured quantity and can simply find this as X = H-1•Y
Value of the Transfer Function in Each Field of Application • In a diagnostic or remote sensing imaging application • Know the input (X) as transmitted signal • Have the output (Y) as received signal • Desire characteristics of the imaged system and can find this as H = Y-1•X • Thus, the transfer function (H) adapts its role to the need of the application
Manipulation of the Transfer Function • Depends on the process of Convolution • Applies to either the time or frequency domain • Convolution in the time domain that connects the output to the input of a system directly corresponds to simple multiplication in the frequency (transform) domain that greatly facilitates input-output relations
In ENGR 365 • Learning principles and tools of Linear Systems applicable to multiple fields • In the lab: testing out techniques on audio signals using MATLAB • On Wed. 2/1, please meet in the F166 lab for orientation & MATLAB Introduction !! • Collaborate but do 1 report/student on Lab #1 • MATLAB scripts will also be required to complete certain HW problems
After ENGR 365 • By the conclusion of this course, you should at least know how to • Select coefficients for the digital version of any of the basic filter types (LP, HP, BP, BS) • Be able to simulate the performance of your proposed design with MATLAB • NOT Implement on a dedicated DSP and/or design more advanced adaptive filters since falls beyond the scope of this course, limited to an Introduction to Digital Signal Processing