Download
1 / 8
80 likes | 257 Views
Some notes on developments of digital zenith cameras Christian Hirt WA Centre for Geodesy, Perth & Institute for Advanced Study, Munich Prepared for research visit at Sopron 28/29 Nov 2014. Hannover digital zenith camera Experiences. Development.

E N D
Some notes on developments of digital zenith cameras Christian Hirt WA Centre for Geodesy, Perth & Institute for Advanced Study, Munich Prepared for research visit at Sopron 28/29 Nov 2014
Hannover digital zenith camera Experiences • Development • Based on existing analogue camera (from 1975) • Equipment with CCD, Tilt sensors & GPS in 2000 • First light 2000, with new CCD in 2002 • First production of accurate vertical deflections (VD) in 2003 • Full automation (motors, steering) in 2005 • Application • By now at observations at ~1000 stations • More than 80,000 single measurements of VD • (i.e., 160,000 CCD frames, and • mostly 40-50 single measurments per station) • Around 2.5 million stars processed • Accuracy for VDs 0.05“-0.1“ (20 min observation) • Peak performance of ~22 stations per night Hannover digital zenith camera 2003 In the Swiss Alps
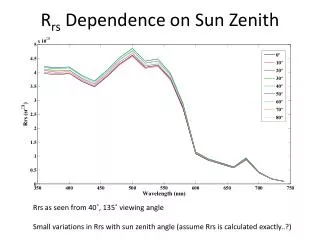
Construction of digital zenith cameras for accurate determination of vertical deflections • Astrometric imaging • >20 stars should be available per image • 10 stars (e.g. in galactic pole regions) are the bare minimum for useful results • Pixel scale should be small enough to reach sub-arc-sec precision for • star centering (e.g., 1.8“/pixel allowed us to reach few 0.1“ sub-pixel precision • for X-Y star coordinates) • Exposure times choosen short enough to avoid trailing (e.g., 0.2-0.4 s) • Standard CCD-imaging techniques (dark frames/white frames) did not have • impact on results, nor did the use of IR-filters • Cooling recommended Lat/Lon accuracy as function of star count X-Y coordinate precision as function of exposure time
Construction of digital zenith cameras for accurate determination of vertical deflections • Astrometric data processing • Star centering with point spread functions or „centre-of-mass“ determination • Tycho-2 was good enough for Hanover camera, UCAC-3 as an alternative • (more recent epochs of stars, UCAC has 100 instead of 2.5 million stars) • Suitable transformation models suprisingly simple • - 4 parameter (2 translations, 1 scale, 1 rotation) between • X-Y imagestar coordinates and projected alpha/delta • catalogue coordinates • Translations were found to be time dependent in the • course of longer observation series • Excellent algorithms for star identification available • (Groth 1996, Valdes et al 1995): • Search for similar triangles in both fileds Translation X of CCD from camera axis as function of time, 1 pixel = 9 micrometer
Construction of digital zenith cameras for accurate determination of vertical deflections • Tilt measurements • Crucially important for accurate zenith camera measurements • Must be carried out in two camera faces to control zero offsets • 2-axis measurement system needed, if possible back-up system (2 x 2 • axis mutual check (otherwise tilt goes unchecked) • We made good experiences with Lippmann www.l-gm.de They • developed and configured tiltmeters together with us, which are now • well suited to requirements of zenith camera measurements • - robust (temperature changes, transport, centrifugal forces) • - low drift of zero offset • We were able to reach 0.04-0.05“ accuracy for the tilt measurements Lippmann 2axis High-resolution tilt meter (2013) Lippmann 1 axis High-resolution tilt meter (2005)
Construction of digital zenith cameras for accurate determination of vertical deflections • Tilt sensor calibration & modeling • Celestial calibration • - Tilt sensors can be calibrated using astrometry • - Four parameters: two scale factors, orientation with CCD and • misalignment between the two tilt sensor axes) • Benefits: - Angular scale of tilt values „fits“ to ICRS • - only coarse alignment of CCD to tilt meters required, • calibration does the rest • Flexible evaluation models • Accurately evaluates tilt measurements in two faces • Tolerates arbitrary misalignment between the two camera faces • (e.g., rotation of 170° instead of 180° ) • - Applies the calibration parameters
Construction of digital zenith cameras for accurate determination of vertical deflections • GPS-based time tagging • 1 ms accuracy reached ( =15 mas) • Requires calibration of shutter latency
Construction of digital zenith cameras for accurate determination of vertical deflections • Camera automation - motivation • Important for production of large vertical deflection data sets (e.g., several 100 stations) • Accelerated instrumental set up and measurement routines • Operators are not „burdened“ with additional tasks during an 8 hours night shift • Reduces chances for mistakes during the observation • Steps that can be automated Levelling of the camera (with electric actuators), Also automatic realignment with the plumb line if ground is unstable (we tried to keep the tilt values as small as possible…) 2. Rotation of the camera (most important) 3. Focussing of the camera (if the focus changes frequently, i.e., f(time))