Download
1 / 16
160 likes | 170 Views
This robotic arm design features a carefully engineered body with multiple degrees of freedom in the head, arms, torso, and legs for intricate movements. Sturdy brackets allow for versatile servo mounting orientations, enhancing flexibility. The arm assembly includes custom and store-bought brackets for stability. Ball bearings are integrated to reduce friction and stress on the servo components, increasing efficiency. The hip design enables movements like leg lift, squat, push-up, and more. Detailed torque requirements and RoBoard servo specifications ensure optimal performance. Stress analysis results provide insights into bracket and assembly durability and deformation. Discover this powerful, cost-effective robotic arm solution for various applications.

E N D
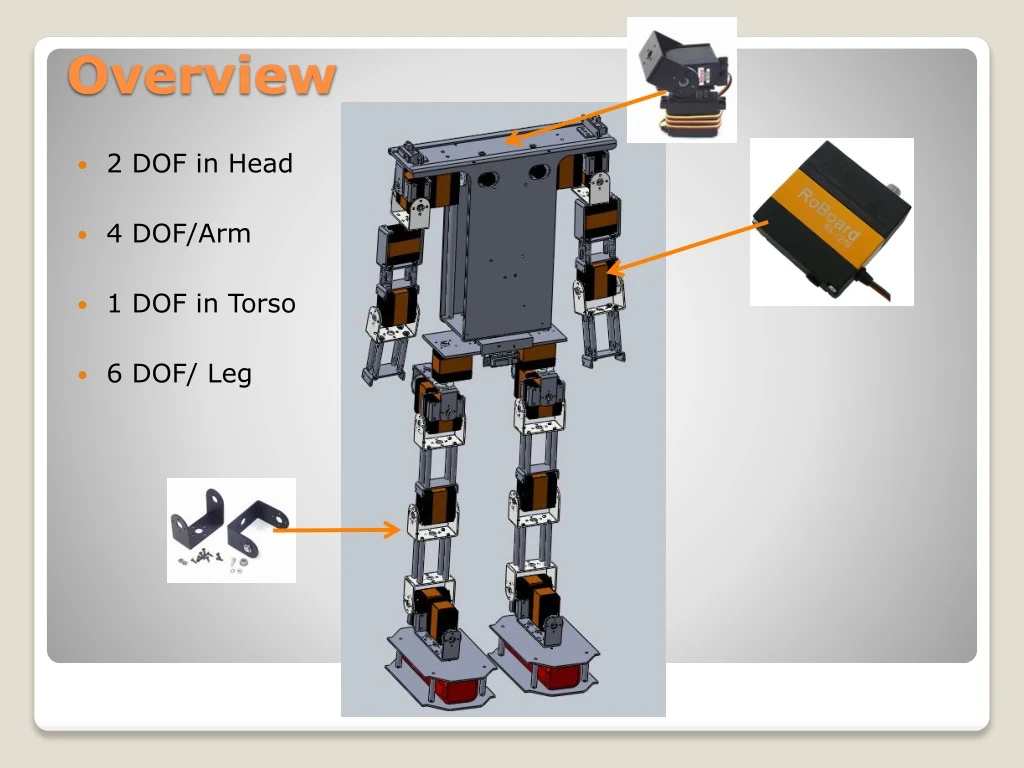
2 DOF in Head • 4 DOF/Arm • 1 DOF in Torso • 6 DOF/ Leg Overview
~25.5” Tall (feet to shoulder) • 10” Shoulder Width • 2.5” Torso Width BODY DIMENSIONS
4 Simple brackets for multiple servo mounting orientations • Side mount • Bottom mount • Large “C” bracket • Single plane dual axis rotation • Shoulder Rotation Side Mount Bottom Mount Large “C” Custom Servo Brackets Shoulder Rotation
Simple Aluminum rods, ¼” • Cut to length Height adjustability • Very cheap (~$7 per 6ft) • Integrates into standard servo brackets. Arm Assembly Custom Brackets Store bought Brackets Simple 6-32x1/2” machine screws for assembly LINKS & BRACKET INTEGRATION
Ball Bearing • Axial and Radial Loads • Low rotation friction • Ball Bearings are cheap • Reduce stress on servo horn • Increased hip Stiffness -Green Rotation -Gray Static HIP DESIGN
Leg Lift Squat T3 Push up T3 T2 Te Te T1 (cos(ϴ))+g1(L1/2)(cos(ϴ)) T2=(g2)(L2/2)(cos(ϴ))+(L2)(g3) T3~0 TORQUE REQUIREMENTS F F/2 F/2
ROBOARD SERVO SPECS • Standard size digital servo• Torque @7.4V: 35.0 kg-cm/486.0 oz-in• Speed: 0.11 sec/60º• Voltage: 6 to 7.4V • Weight: 70g TORQUE RESULTS






















