Download

1 / 30
300 likes | 798 Views
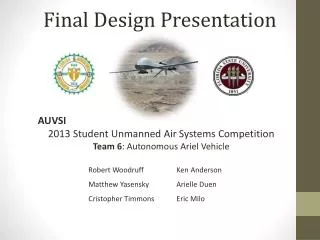
P14043-Smart Cane Senior Design Final Presentation. Introductions. Lauren Bell – Mechanical Engineer Jessica Davila – Industrial Engineer Jake Luckman – Mechanical Engineer William McIntyre – Electrical Engineer

E N D
Introductions • Lauren Bell – Mechanical Engineer • Jessica Davila – Industrial Engineer • Jake Luckman – Mechanical Engineer • William McIntyre – Electrical Engineer • Aaron Vogel – Mechanical Engineer
Agenda • Problem Description • Design Challenge • System Design and Operation • Testing and Traceability • Project Process • Conclusion • Recommendations • Lessons Learned • Acknowledgements
Problem Description Safe and easy navigation in the world is difficult for the blind and deaf/blind Project Goal Inexpensive Intuitive Expensive Training Required COMMON SOLUTIONS Limited Situation Feedback Excellent Situation Feedback
Design Challenge… …To design, fabricate, assemble and validate a ‘haptic handle’ • To be attached to a traditional cane • Provide directional feedback to blind and deaf/blind users
MSD Process Overview MSD I MSD II
Design Considerations Customer desires needed to be transformed into technical requirements… Learned – Fully understand the customer needs ASAP …otherwise time will be wasted
Potential Concepts Brainstorming and benchmarking yielded the following likely candidates… • Track Ball • Piston Push Feedback • Torque ‘Jerk’ • Magnetic Force Feedback • Scroll Navigation Learned – Prototyping accelerates the concept selection process
Optimizing Roller Design • Roller Speed • Roller Shape • Bump Height Learned – Quick and simple tests/prototypes will quickly narrow the design. Don’t overanalyze!
Electrical Design Electrical design driven by mechanical design and Engineering requirements
Mechanical Design • ‘Bump’ Roller Sub-assembly • DC gear motor • Roller arms • Dowel pins • Press fit ball bearings Design provides effective directional feedback
Final Design Documentation of everything is crucial for future project iterations
Fabrication and Assembly • ~25 manufactured parts • Material Changes • Part Modifications • Time management Learned – Fabrication and assembly will expose necessary changes in the design
Testing and Traceability Final tests were within predicted values
Testing and Traceability Prototype meets all non-technical requirements
Problem Tracking System Learned – Once problems started to arise and stack up, Problem Tracking significantly helped us manage the problems
Risk Curve Reduction of risks due to analysis (heat, stress, weight) RISKS: Machining issues with thin ABS covers, ABS back cover breaks during testing phase, PCB not arriving on time PCB working, assembly between handle & cane holds together, wires fit into handle design Useful tool to track actual status against planned
ProjectPlan and Efficiency Final Deliverables
Imagine RIT • 200+ “Users” • ~100% Positive Feedback • University News Interview Users at Imagine RIT demonstrated our project met its objectives and was a success.
Lessons Learned • Project Management • Customer Interaction • Creating a good team dynamic • “What’s the best thing I can be doing right now?”
Recommendations • Complete cane with integration to sensors • Improve handle to provide feedback on changes in elevation and proximity of obstacles. • Redesign handle with fewer parts and simple assembly • Attempt to redesign with smaller batteries • Strengthen the outer structure of handle • Water/weather proof
Recommendations for MSD • Shorter presentations in MSD I • Teach project management skills in other courses • Evenly distribute the team resources • Use guides from industry
Acknowledgements • Guides • Gary Werth • Gerry Garavuso • Customers • Dr. Patricia Iglesias • Gary Behm • Tom Oh • Professor Mark Indovina • Jeff Lonneville
Motor Analysis • Torque/speed • Power consumption
Design Grip Pressure Spec • Ensure handle functions under excessive grip • Measure pressure of displaced air for rough idea • Median pressure ~3 psi • Compare to Grip Pressure Study* • FSR sensors on glove • “Crush grip” measured on 50mm diameter handle • 5 male and 5 female adults • Maximum pressure ~3.1 psi • Our measurements matched the study, therefore: • Marginal Grip Pressure: 3 psi • Maximum (Design) Pressure: 5 psi * Tao Guoqiang; Li Jun yuan; Jiang Xian feng, "Research on virtual testing of hand pressure distribution for handle grasp," Mechatronic Science, Electric Engineering and Computer (MEC), 2011 International Conference on, pp.1610,1613, 19-22 Aug. 201
Required Motor Torque • Maximum moment could happen when: • Grip reaches design pressure • Pressure force is perpendicular to contact point • Palm contact area is maximum on roller • Two rollers are contacted • Maximum moment caused by design pressure • 50.1 oz-in • Motor selection will not be heavily constrained • Variety of motors that meet torque, size and rotation requirements
Bump Rotation/Roller Analysis • Bumps per rotation • Servo to Roller Spacing • Effectiveness of our model – Audience?