Download
1 / 25
260 likes | 454 Views
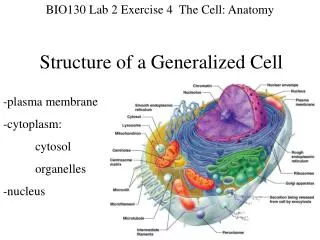
Competitive Time and Traffic Analysis of Position-based Routing using a Cell-Structure. Stefan Rührup and Christian Schindelhauer Heinz Nixdorf Institute University of Paderborn Germany IEEE WMAN‘05. Outline. Part I: Topology control for position-based routing

E N D
Competitive Time and Traffic Analysisof Position-based Routingusing a Cell-Structure Stefan Rührup and Christian Schindelhauer Heinz Nixdorf Institute University of Paderborn Germany IEEE WMAN‘05
Outline • Part I: Topology control for position-based routing • Position-based routing: greedy forwarding and recovery • Topology issues in position-based routing • Abstracting from graph theory: the cell structure approach • Part II: Performance measures and algorithms • Competitive performance measures • Single-path versus multi-path routing strategies
Part I Topology Control for Position-based Routing
Position-based routing in a nutshell • Given: Source, location of the destination • Task: Deliver a message to the destination • Assumptions: • A node can determine its own position • Each node knows the positions of the neighbors • The position of the target is known transmission range source target (x,y)
Greedy forwarding and recovery (1) progress boundary (circle around the destination) transmission range • With position informationone can forward a message in the "right" direction(greedy forwarding) • Example: t s no routing tables, no flooding!
Greedy forwarding and recovery (2) right-hand rule needs planar topology! greedy recovery ? barrier • Greedy forwarding is stopped by barriers (local minima) • Recovery strategy: Traverse the border of a barrier ... until a forwarding progress is possible (right-hand rule) t greedy s transmission range routing time depends on the size of barriers!
The Cell Structure Define a grid consisting of l l squares v transmission radius (Unit Disk Graph)
The Cell Structure nodes exchange beacon messages node v knows positions of ist neighbors v transmission radius (Unit Disk Graph)
The Cell Structure each nodeclassifies the cells in ist transmission range v node cell link cell barrier cell
The Cell Structure each node includes the classification in its beacon messages (only constant overhead) v node cell link cell barrier cell
Routing based on the Cell Structure • Routing based on the cell structure uses cell paths cell path = sequence of orthogonally neighboring cells • Paths in the original network (here: unit disk graph) and cell paths are equivalent up to a constant factor • no planarization strategy needed(required for recovery using the right-hand rule)
Routing based on the Cell Structure virtual forwarding using cells w v physical forwarding from v to w, if visibility range is exceeded node cell link cell barrier cell
Part II Performance Measures and Algorithms
Performance Measures • barriers make routing difficult • what is the worst case scenario? • it depends ... • how difficult is a scenario? • what would the best algorithm do? • comparative ratios
How difficult is a scenario? barrier
How difficult is a scenario? perimeter barrier perimeter (p) = number of border cells
What would the best algorithm do? length of shortest barrier-free cell path (h)
Competitive Ratio single-path „ • competitive ratio: • competitive time ratio of a routing algorithm • h = length of shortest barrier-free path • algorithm needs T rounds to deliver a message “ solution of the algorithm optimal offline solution cf. [Borodin, El-Yanif, 1998] T h
Comparative Ratios h+p • optimal (offline) solution for traffic:h messages (length of shortest path) • this is unfair, because ... • offline algorithm knows the barriers • but every online algorithm has to pay exploration costs • exploration costs: sum of perimeters of all barriers (p) • comparative traffic ratiocf. [Koutsoupias, Papadimitriou 2000] M = # messages used h = length of shortest path p = sum of perimeters
Comparative Ratios • measure for time efficiency:competitive time ratio • measure for traffic efficiency: comparative traffic ratio • Combined comparative ratiotime efficiency and traffic efficiency
Algorithms under Comparative Measures • Sinlge-path strategies:no parallelism, traffic-efficient (time = traffic)example: GuideLine/Recovery • follow a guide line connecting source and target • traverse all barriers intersecting the guide line • Time and Traffic: • Multi-path strategies: speed-up by parallel exploration, increasing trafficexample: Expanding Ring Search • start flooding with restricted search depth • if target is not in reach then repeat with double search depth • Time: Traffic:
Algorithms under Comparative Measures time ratio traffic ratio combined ratio maze GuideLine/Recovery (single-path) Expanding Ring Search (multi-path) open space time traffic GuideLine/Recovery (single-path) Expanding Ring Search (multi-path) Is that good? on the scenario It depends ...
The Alternating Algorithm • ... uses a combination of both strategies: • i = 1 • d = 2i • start GuideLine/Recovery with time-to-live = d3/2 • if the target is not reached then start Flooding with time-to-live = d • if the target is not reached then i = 2 · i goto line 2 • Combined comparative ratio:
Conclusion • cell structure abstracts from graph theoretical issues • neighborhood information (= cell classification) causes only constant overhead in beacon messages • implicit planarization,well-suited for position-based routing • comparative performance measuresin relation to the difficulty of the scenario (optimal distance & perimeter of barriers) • time and traffic efficiency
Thank you for your attention! Questions ... Stefan Rührup sr@upb.de Tel.: +49 5251 60-6722 Fax: +49 5251 60-6482 Algorithms and Complexity Heinz Nixdof Institute University of Paderborn Fürstenallee 11 33102 Paderborn, Germany