Download
1 / 1
10 likes | 111 Views
RADIO TELESCOPE . Space Systems and Control Laboratory (Dec08-02). Abstract. Work breakdown.

E N D
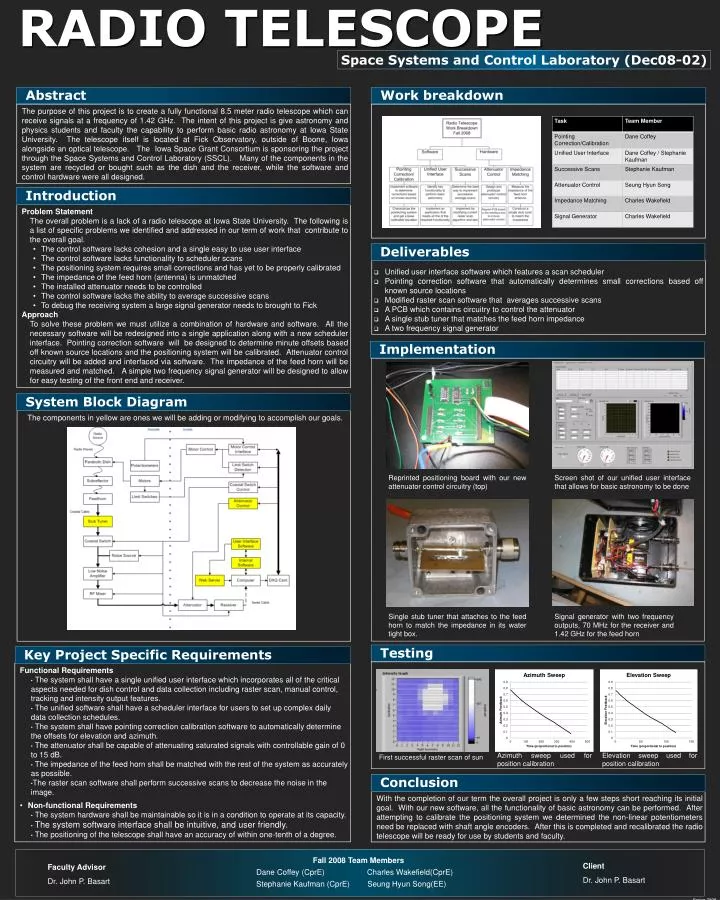
RADIO TELESCOPE . Space Systems and Control Laboratory (Dec08-02) Abstract Work breakdown The purpose of this project is to create a fully functional 8.5 meter radio telescope which can receive signals at a frequency of 1.42 GHz. The intent of this project is give astronomy and physics students and faculty the capability to perform basic radio astronomy at Iowa State University. The telescope itself is located at Fick Observatory, outside of Boone, Iowa alongside an optical telescope. The Iowa Space Grant Consortium is sponsoring the project through the Space Systems and Control Laboratory (SSCL). Many of the components in the system are recycled or bought such as the dish and the receiver, while the software and control hardware were all designed. Introduction • Problem Statement • The overall problem is a lack of a radio telescope at Iowa State University. The following is a list of specific problems we identified and addressed in our term of work that contribute to the overall goal. • The control software lacks cohesion and a single easy to use user interface • The control software lacks functionality to scheduler scans • The positioning system requires small corrections and has yet to be properly calibrated • The impedance of the feed horn (antenna) is unmatched • The installed attenuator needs to be controlled • The control software lacks the ability to average successive scans • To debug the receiving system a large signal generator needs to brought to Fick • Approach • To solve these problem we must utilize a combination of hardware and software. All the necessary software will be redesigned into a single application along with a new scheduler interface. Pointing correction software will be designed to determine minute offsets based off known source locations and the positioning system will be calibrated. Attenuator control circuitry will be added and interfaced via software. The impedance of the feed horn will be measured and matched. A simple two frequency signal generator will be designed to allow for easy testing of the front end and receiver. Deliverables • Unified user interface software which features a scan scheduler • Pointing correction software that automatically determines small corrections based off known source locations • Modified raster scan software that averages successive scans • A PCB which contains circuitry to control the attenuator • A single stub tuner that matches the feed horn impedance • A two frequency signal generator Implementation System Block Diagram The components in yellow are ones we will be adding or modifying to accomplish our goals. Reprinted positioning board with our new attenuator control circuitry (top) Screen shot of our unified user interface that allows for basic astronomy to be done Single stub tuner that attaches to the feed horn to match the impedance in its water tight box. Signal generator with two frequency outputs, 70 MHz for the receiver and 1.42 GHz for the feed horn Testing Key Project Specific Requirements • Functional Requirements • The system shall have a single unified user interface which incorporates all of the critical aspects needed for dish control and data collection including raster scan, manual control, tracking and intensity output features. • The unified software shall have a scheduler interface for users to set up complex daily data collection schedules. • The system shall have pointing correction calibration software to automatically determine the offsets for elevation and azimuth. • The attenuator shall be capable of attenuating saturated signals with controllable gain of 0 to 15 dB. • The impedance of the feed horn shall be matched with the rest of the system as accurately as possible. • The raster scan software shall perform successive scans to decrease the noise in the image. • Non-functional Requirements • The system hardware shall be maintainable so it is in a condition to operate at its capacity. • The system software interface shall be intuitive, and user friendly. • The positioning of the telescope shall have an accuracy of within one-tenth of a degree. Azimuth sweep used for position calibration Elevation sweep used for position calibration First successful raster scan of sun Conclusion With the completion of our term the overall project is only a few steps short reaching its initial goal. With our new software, all the functionality of basic astronomy can be performed. After attempting to calibrate the positioning system we determined the non-linear potentiometers need be replaced with shaft angle encoders. After this is completed and recalibrated the radio telescope will be ready for use by students and faculty. Fall 2008 Team Members Dane Coffey (CprE) Charles Wakefield(CprE) Stephanie Kaufman (CprE) Seung Hyun Song(EE) Client Dr. John P. Basart Faculty Advisor Dr. John P. Basart Spring 2008



















