Download
1 / 13
130 likes | 203 Views
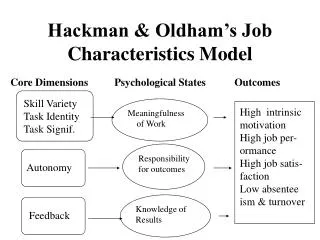
Course 3 : The task model construction ;. Ac. Tk. Tr. MSt. Modeling: the robot. q(t). T(t). (t). x(t). V(t). Problem Definition. q 1. X 1 ,Y 1. Y. time. q 2. q 2. X 2 ,Y 2. q 1. X. time. Problem Definition. X 1 ,Y 1. Y. P 2. P 1. q 2. X n ,Y n. q 1. P n. X.

E N D
Ac Tk Tr MSt Modeling: the robot q(t) T(t) (t) x(t) V(t)
Problem Definition q1 X1,Y1 Y time q2 q2 X2,Y2 q1 X time
Problem Definition X1,Y1 Y P2 P1 q2 Xn,Yn q1 Pn X
The inverse kinematic for a 2 DOF RR q1 X1,Y1 q11 q21 Y q12 time X2,Y2 q11 q2 q22 q22 q12 q12 X time
The inverse kinematic for a 2 DOF RR l2 tet2 X1,Y1 q21 l2 Y l1 tet0 tet1 l3 l1 q11 l3 X q1= tet1+ tet0 q2=2pi-(tet1+tet2) Go to MATLAB
The working volume X1,Y1 Y P2 P1 q2 ? Xn,Yn q1 Pn X Go to MATLAB
Transpose the points in trajectoryby interpolation q1 q11 q12 time q2 q22 q12 time
Transpose the points in trajectoryby interpolation Go to MATLAB
Transpose the points in trajectoryby bang-bang Go to MATLAB