Download

1 / 18
180 likes | 416 Views
Iterative Reweighted Least-Squares Algorithm for 2-D IIR Filters Design. Bogdan Dumitrescu, Riitta Niemistö Institute of Signal Processing Tampere University of Technology, Finland. Summary. Problem: Chebyshev design of 2-D IIR filters Algorithm: combination of

E N D
Iterative Reweighted Least-Squares Algorithm for 2-D IIR Filters Design Bogdan Dumitrescu, Riitta Niemistö Institute of Signal Processing Tampere University of Technology, Finland
Summary • Problem: Chebyshev design of 2-D IIR filters • Algorithm: combination of • iterative reweighted least squares (IRLS) • Gauss-Newton convexification • convex 1-D and 2-D stability domains • Optimization tool: semidefinite programming
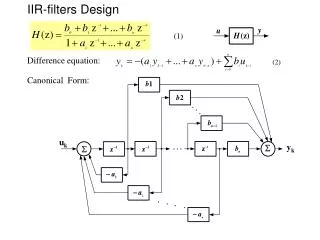
2-D IIR filters • Transfer function • Degrees m1, m2, n1, n2 are given • Coefficients are optimized • Denominator can be separable or not
Optimization criterion • p-norm error w.r.t. desired frequency response • Special case: p large (approx. Chebyshev) • The error is computed on a grid of frequencies
Optimization difficulties • The set of stable IIR filters is not convex • The optimization criterion is not convex SOLUTIONS • Iterative reweighed LS (IRLS) optimization • Convex stability domain around current denominator • Gauss-Newton descent technique
Iteration structure - current denominator set of stable denominators - next denominator descent direction convex domain around current denominator
2-D convex stability domain • Based on the positive realness condition • Described by a linear matrix inequality (LMI) • Using a parameterization of sum-of-squares multivariable polynomials • Pole radius bound possible
Gauss-Newton descent direction • In each iteration, the descent direction is found by a convexification of the criterion • Semidefinite programming (SDP) problem
IRLS - IIR filters with fixed denominator • Start with • Increase exponent with • Compute new weights • LS optimize: • Update numerator • Repeat until convergence
GN_IRLS Algorithm 1. Set 2. Set 3. Compute new weights 4. Compute GN direction with new weights 5. Find optimal step by line search 6. Compute new filter 7. With i=i+1, repeat from 2 until convergence
GN_IRLS+ • Design IIR filter using GN_IRLS (with trivial initialization) • Then, keeping fixed the denominator, reoptimize the numerator using IRLS
Design example • Desired response: ideal lowpass filter with linear phase in passband
Design details • Design data (as in [1]): • Degrees: • Separable denominator • Group delays: • Stop- and pass-band: • Pole radius: • Norm: • Implementation: Matlab + SeDuMi
How to choose g ? GN_IRLS only: variations with g GN_IRLS+: many values of g give similar results
References [1] W.S.Lu, T.Hinamoto. Optimal Design of IIR Digital Filters with Robust Stability Using Conic-Quadratic Programming Updates. IEEE Trans. Signal Proc., 51(6):1581-1592, June 2003. [2] B.Dumitrescu, R.Niemistö. Multistage IIR Filter Design Using Convex Stability Domains Defined by Positive Realness. IEEE Trans. Signal Proc., 52(4):962-974, April 2004. [3] C.S.Burrus, J.A.Barreto, I.W.Selesnick. Iterative Reweighted Least-Squares Design of FIR Filters. IEEE Trans. Signal Proc., 42(11):2926-2936, Nov. 1994.