Download
1 / 21
210 likes | 316 Views
Optimal Arrangement of Ceiling Cameras for Home Service Robots Using Genetic Algorithms. Stefanos Nikolaidis* , ** and Tamio Arai** *R&D Division, Square Enix Co., Ltd., Japan **Department of Precision Engineering, The University of Tokyo, Japan. Contribution to Real-World Environment.

E N D
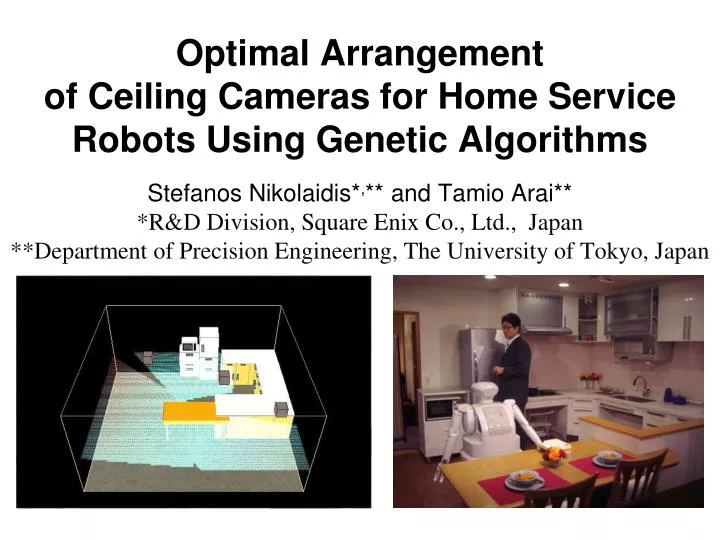
Optimal Arrangement of Ceiling Cameras for Home Service Robots Using Genetic Algorithms Stefanos Nikolaidis*,** and Tamio Arai** *R&D Division, Square Enix Co., Ltd., Japan **Department of Precision Engineering, The University of Tokyo, Japan
Contribution to Real-World Environment Results from this research have been used for the Kanagawa House Square Model Room, as part of the Universal Design Project Kanagawa House Square Model Room Virtual 3D Model of the Kanagawa Room Placement of Cameras according to simulation results Camera Placement Optimization
Background Use of robots in home environments • EXTERNAL SENSORS PLACED ON THE ENVIRONMENT ARE NEEDED • Problem: Cost of sensor placement, network delay Robots need to be localized to perform home service tasks As few sensors as possible • arrange sensors supporting different kinds of robots • ceiling cameras are used in this study Purpose: place the cameras considering robot localization
Goal of this Study Purpose: place the cameras considering robot localization Robots need to be localized with a certain precision Robot should be visible Objectives MINIMIZE LOCALIZATION ERROR MAXIMIZE AREA COVERAGE Place the cameras considering area covered and average localization error of visible area 4
Camera Placement Optimization Objectives ACCURACY COVERAGE Maximizethe area coveredby the cameras Minimize Localization Error • Single-Objective Optimization • genetic – algorithm • probabilistic global optimization algorithm • Multi-Objective Optimization • NSGA (Non-dominated Sorting • Algortihm [Srinivas 1995]) • multi-pareto genetic algorithm
Past Research • Optimal Camera Placement • COVERAGE: • Art Gallery Problem : find the minimum number of guards covering an art gallery (NP-hard [Lee 1986] ) [O’Rourke 1987], [Schermer 1992] • Every guard: two degrees of freedom, 360º FOV • ACCURACY: • Intelligent Space Project [Lee 2002], [Hashimoto 2005] • Limited for two cameras, symmetric arrangement is assumed • This study: • four degrees of freedom for each camera • different FOVs, no symmetric arrangement assumption
Conditions of Optimization Problem 3D model of room 2D cut at a specific height Camera pose [x, y, pan, tilt] Calculation of FOV of camera and Projection at a specific height Occlusion calculated from obstacles
Single-Objective Optimization:Maximize the Area Covered genetic algorithm • individual: • [x0, y0, pan0, tilt0, … , xn, yn, pann, tiltn ] n: number of cameras • selection: according to the fitness of each individual • fitness: visible ratio initial population new population evaluation elitism mutation crossover selection gen=gen+1 final population
Comparison to Past Research:Results GA – Steepest Descent • 100% of the area is visible for three cameras (GA) • GA gives better results than steepest descent but slower • (Pentium D CPU 3.20GHz used) • GA is recommended, as computational time not significant
Discussion (Single-Objective Optimization) • number of cameraschanged in order to achieve required visible ratio • genetic algorithm gives better results than steepest descent (used in past research) • using three cameras the robot is visible at 100% of the area (Kanagawa Model House environment) • Localization error should also be considered, as the robot needs to be localized with a certain precision due to: • safety reasons • complexity of home environment • complexity of home-service tasks
Pixel P’ corresponding to Point P error Area of uncertainty Ω small P Image Plane large П Ground Area covered by vision sensor Localization Error due to Image Resolution localization uncertainty due to image resolution 3D localization with triangulation
Multi-Objective Optimization Place the cameras considering area covered and average localization error of visible area A set of optimal solutions minimizing the objective conflict between the objectives needs to be found A multi-pareto genetic algorithm, theNSGA Algorithm[Srinivas 1995]is proposed for this problem
NSGA Algorithm NSGA is proposed, because it: • can solve optimization problem of multiple objectives • gives set of optimal solutions with only one execution • can perform at the same time both maximization and minimization of objectives However, it • has a large computational load • has dependence on the sharing parameter 13
Multi-Objective Optimization with NSGA Algorithm Constraints: Visible Ratio > 0.8 AND Localization Error < 70 [mm2 ] Set of optimal solutions
Discussion GA (single-objective) is faster, simpler and it is recommended if localization accuracy is not important
Conclusion Better Results than Steepest -descent method used in past research • Single-objective case • robot is visible at 100% of the room area • genetic algorithm implemented • Multi-objective case • found set of optimal solutions minimizing the objective conflict. • arrangement where robot is visible at 85% of the area and average localization error below 65 [mm2] found • Single-objective approach simpler and recommended if localization accuracy not important
Future Research • improve sharing efficiency of NSGA algorithm (dynamic niching, clustering analysis) • apply SPEA (Strength Pareto Evolutionary Algorithm) [Zitzler 1999], a variation of NSGA • the SPEA is proven to perform better than NSGA on the 0/1 knapsack problem • Generalize the problem for different kinds of sensors • range sensors, RFID technology etc. on the camera placement problem?
Pareto Front – NSGA Algorithm f1 C f1(A)>f1(B) A B f2(A)<f2(B) f2 NSGA (Non-dominated Sorting Genetic Algorithm) [Srinivas 1995] f1 RANK 2 RANK 1 sharing f2 20
Multi-Objective Optimization: Common Approach • Gives one solution only with one execution • Weight-dependent • Determining the appropriate weights is a difficult problem itself Evaluation function of linear combination of objectives 21