Download
1 / 12
130 likes | 348 Views
Rigid Bodies, Translations, and Rotations. Dual Credit Physics Montwood High School R. Casao.

E N D
Rigid Bodies, Translations, and Rotations Dual Credit Physics Montwood High School R. Casao
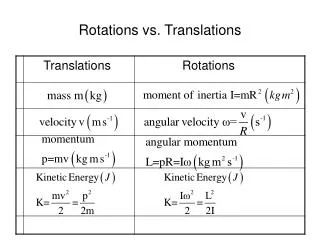
When an extended object, like a wheel, rotates about its axis, the motion cannot be analyzed by treating the object as a particle because at any given time different parts of the object have different linear velocities and linear accelerations. • It is convenient to consider the extended object as a large number of particles, each having its own linear velocity and linear acceleration. • For rotating objects, we assume that the object is rigid. • A rigid body is an object or a system of particles in which the distances between particles are fixed (the separations between all pairs of particles remains constant).
Rigid-body rotation is restricted to solids. • In reality, the particles (atoms & molecules) of a solid vibrate constantly and solids can undergo elastic and inelastic deformations. • Most solids can be considered rigid bodies for the purposes of analyzing rotational motion. • A rigid body may be subject to either or both translational or rotational motion. • Translational motion is linear motion; every particle has the same instantaneous velocity, which means the object is not rotating.
Rotational motion is motion about a fixed axis; all the particles have the same instantaneous angular velocity and travel in circles about the axis of rotation. • General rigid body motion is a combination of translational and rotational motions. • Rolling is a common example of both the translational and rotational motion of a rigid body.
The rolling motion of a wheel is a combination of purely translational and purely rotational motions. • Every point on the wheel rotates about the center with angular speed . • Every point on the outside edge of the wheel has linear speed vcom. • Purely translational motion: every point on the wheel moves forward with speed vcom. • Combination of rotational motion and translational motion produces the rolling motion of the wheel.
The portion of the wheel at the bottom (point P) is stationary and the top of the wheel is moving at speed 2·vcom. The wheel is moving fastest near the top than near the bottom because the spokes are more blurred at the top than at the bottom.
At each instant, a rolling object rotates about an instantaneous axis of rotation through the point of contact of the object with the surface it is rolling on or along the line of contact of the object with the surface. • The location of this axis changes with time. • The point or line of contact of the body with the surface is instantaneously at rest (0 m/s). • The point at the top has twice the tangential speed (2∙v) of the center of mass point (v) because the top point is twice (2·r∙ = 2·v) as far away from the instantaneous axis of rotation as the center of mass is (r∙ = v).
Figure 8-1Rolling—a combination of translational and rotational motions
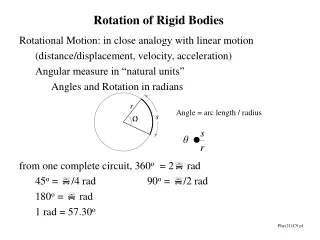
Rolling Without Slipping • As an object rolls without slipping, the length of the arc s between two points of contact on the circumference is equal to the linear distance traveled. (Think of paint coming off a roller.) This distance is s = r∙θ. The speed of the center of mass is vCM = r∙ω.
The center of mass of the object is directly over the point of contact P and moves a linear distance s. • In terms of the speed of the center of mass and the angular speed , the condition for rolling without slipping is: • The condition for rolling without slipping is also given by s = r∙, where s is the distance the object rolls (the distance the center of mass moves).
Accelerated Rolling Without Slipping • Assuming the object started from rest: • An object will roll without slipping if the coefficient of static friction between the object and the surface is great enough to prevent slippage. • If there is rolling and slipping, there is no clear relationship between translational and rotational motions and vcm = r∙ does not hold.