Download
1 / 14
140 likes | 150 Views
Artificial Muscle based on Flexinol motor wire. Scott Renkes Advisor: David Noelle. Purpose. Design a new actuator Robotics Prosthetics Teleoperation. Current Technology. Why a new actuator?. Replicate human movement Refined force and velocity control of device

E N D
Artificial Muscle based on Flexinol motor wire Scott Renkes Advisor: David Noelle
Purpose • Design a new actuator • Robotics • Prosthetics • Teleoperation
Why a new actuator? • Replicate human movement • Refined force and velocity control of device • Human like movement allows for better man machine integration • Humanoid robots can more easily mimic humans
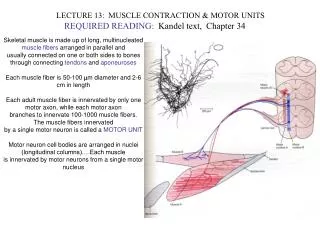
Fibrous Bundled Structure • Flexinol motor wire to replace muscle fibers • Package wires similar to muscle • Flexinol/muscle fiber proportional elasticity • Similar force/length curves
Recruitment • One bundle, one neuron • Weak fast, slow strong • Properties of motor wire allow for variety of activation • Neural Network Controller • Force feedback training • Inverse Dynamics
Neural Net Recruiting • Neural Net Basics • Learning • Memory • Back Propagation • Neural Net Implementation • Computer • Microcontroller • Amplifier • Force Controlled • Force feedback • Desired Force
EMG Controller • Muscle Voltage vs Muscle Force • EMG signals represent muscle force • Neural Network for EMG pattern recognition
Human Like? • Force length curve • Normalized • Recruitment • Use neuron control method • Inverse Dynamics
Project Status • Completed work • Study properties of motor wire • Calculate efficiency of passive cooling • Develop Structure and Control for the device • Design test bed • Examine neural network solution • Current Work • Finish building actuator
Future Work • Code user friendly interface for training and controlling neural network • Implement portable microcontroller neural networks • Design portable batter pack to drive system