Download
1 / 89
900 likes | 1.03k Views
Discover the basic equations and variational principles of elastic mechanics to solve 2D and 3D solid structure problems efficiently. Learn about axisymmetric modeling, isoparametric elements, stress recovery, and numerical integration techniques. Understand the five fundamental assumptions in elastic mechanics along with the three classes of variables and equations involved. Explore how boundary conditions, compliance matrices, and strain energy density play a crucial role in the analysis of stress and displacement. Gain insights into plane stress and strain problems, as well as axisymmetric challenges, with detailed equations and geometric considerations.

E N D
4 2D and 3D solid structure 4.1 Basic equations of Elastic mechanics and its variational principle 4.2 Two-dimensional Problems 4.3 AxisymmetricProblems 4.4 Three-dimensional Problems 4.5 Isoparametricelement 4.6 Numerical integration techniques 4.7 Stress recovery
4.1 Basic equations of Elastic mechanics and its variational principle Five basic assumptions in elastic mechanics • Continuous • Homogeneous • Isotropic • Linear elastic • Small deformation
Three classes of basic variables • Displacement • Strain • Stress
Three types of equations and two types of boundary conditions • Equilibrium equations • Geometric equations • Constitutive equations • Displacement boundary conditions • Force boundary conditions
3D problem Three classes of basic variables • Displacement • Strain • Stress
Three types of equations and two types of boundary conditions Equilibrium equations
Constitutive equations C is compliance matrix is shear modulus
Displacement boundary conditions BC(u) on Force boundary conditions BC(p) on
BC(u) note BC(p) note Strain energy density
or Constitutive equations: on Displacement BC: on Force BC: Tensor form Displacement: Stress: Strain: Equilibrium equations: Geometric equations: Strain energy density:
Sum: 15 variables: 3 displacement + 6 strain + 6 stress 15 equations: 3 equilibrium equations + 6 geometry equations + 6 constitutive equations
2D plane stress problem Thin plate with uniform thickness. All loads act in plane and distributed uniformly over the thickness. Three classes of basic variables Displacement Strain Stress From the physical equations of 3D problem, a dependent variable can be gotten: or
Three types of equations and two types of boundary conditions Equilibrium equations
Constitutive equations is shear modulus C is compliance matrix
Displacement boundary conditions BC(u) on Force boundary conditions BC(p) on
note BC(u) BC(p) note Strain energy density
or Constitutive equations: on Displacement BC: on Force BC: Tensor form Displacement: Stress: Strain: Equilibrium equations: Geometric equations: Strain energy density:
Sum: 8 variables: 2 displacement + 3 strain + 3 stress 8 equations: 2 equilibrium equations + 3 geometry equations + 3 constitutive equations
2D plane strain problem The dimension of the body in the z direction is very large. Loads are perpendicular to the longitudinal axis and do not vary along the length. Displacement and strain in the z direction are zero. Three classes of basic variables Displacement 。 Strain Stress From the physical equations of 3D problem, a dependent variable can be gotten: or
Equilibrium equations and geometric equations are same with plane stress problem, only physical equations are different: Plane stress problems Plane strain problems
2D Axisymmetric problem Displacements: Strains: Stresses: Equilibrium equations:
on BC(u) BC(p) on
Equations and boundary conditions in elastic mechanics (1) Matrix form (in V) Equilibrium equations: (in V) Geometric equations: (in V) Physical equations: on Displacement boundary conditions: Force boundary conditions: on Strain energy density:
(2) Tensor form (in V) Equilibrium equations: Geometric equations: (in V) Physical equations: (in V) Displacement boundary conditions: on on Force boundary conditions: Strain energy density:
Principle of virtual displacements For a deformable body subjected to external loading, the works of external forces acting on virtual displacements equal to the works of stresses acting on virtual strains. The virtual work of external forces = the virtual works of inner forces. The virtual displacements are available displacements that satisfy displacements boundary conditions on boundaries and geometric compatible conditions in volume.
Principle of virtual displacements is the equivalent integral statement of equilibrium equations and force boundary conditions Equilibrium equations: in V on Force boundary conditions: Selecting variational of actual displacements as weighting functions: We get equivalent integral statement of equilibrium equations and force boundary conditions:
is variational of actual displacements, it satisfies Using Green’s formula have on in V Taking variational of the second equation, we have in V
The first term is the work of stresses acting on virtual strains, is the virtual work of inner forces. The second term is the work of body forces acting on virtual displacements. The third term is the work of surface forces acting on virtual displacements. The sum of last two terms is the work of external forces that named as the virtual work of external forces. The sum of virtual works of external forces and inner forces is zero. It is called as principle of virtual displacements. It matrix form is:
Equilibrium equations and force boundary conditions can be derived from principle of virtual displacements is variational of actual displacements. It can be arbitrary functions that satisfies displacement boundary conditions and geometric compatible conditions. Therefore, we have in V on
Comments for principle of virtual displacements In the process of deriving the principle of virtual displacements by Galerkin’s method, the weighting functions are taking the variational of actual displacements, which satisfy displacement boundary conditions on boundaries and geometric compatible conditions in volume. The physical equations are not introduced into the derivation of the principle of virtual displacements. Principle of virtual displacements is valid for non-linear as well as linear stress-strain relations, such as non-linear elastic or elastic plastic problems.
Principle of minimum potential energy Of all possible displacements that satisfy geometric relations in volume and satisfy displacement boundary conditions on boundaries, the actual displacements make the total potential energy of system take its minimum value. Potential energy of system The variational of the potential energy of system takes zero.
is symmetric tensor. The principle of minimum potential energy is derived from the principle of virtual displacements. Substituting into physical equations, we have The variational of strain energy per unit volume is
Assuming body forces and surface forces are constants, we get the variational of works of external forces. The formula of principle of virtual displacements can be written as
Defining potential energy of system as The variational of the potential energy of system set zero is the formula of principle of virtual displacements
Equilibrium equations and force boundary conditions can be derived from the principle of minimum potential energy Set the variational of potential energy to be zero. Starting from above formula, we can derive equilibrium equations and force boundary conditions.
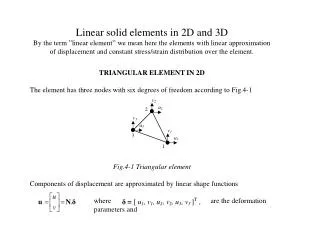
4.2 2D plane stress/strain problems 3 3 2 1 1 2 2D TRIA3 Element left: natural coordinates; right: physical coordinates.
1. Nodal components • The elemental local nodal numbers 1, 2 and 3. • The displacements of each node have two components u and v. • The forces of each node have two components fxi and fyi. • The nodal degrees of freedom vector is • The vector of nodal forces is
2. Shape functions • Any variable within the parent element has to be uniquely defined by its nodal values , and . • The linear polynomial • Its matrix notation where
substitute node coordinates and nodal values into the formula, we have
The shape functions syms s t real b=sym('[1; s; t]') A=[ 1 0 0; 1 1 0; 1 0 1] N=b'*inv(A) %形函数 dN=[diff(N,s);diff(N,t)] %形函数对自然坐标的导数
Matlab function to calculate shape function and its derivative function [N,dN]=sfisot3(r,s) %自然坐标下定义形函数 N(1)=1-r-s; N(2)=r; N(3)=s; %形函数对自然坐标的导数 dN(1,1)=-1; dN(1,2)=1; dN(1,3)=0; dN(2,1)=-1; dN(2,2)=0; dN(2,3)=1;
3. Coordinate map • Map the parent element on to the TRIA3 element. The required relation between the Cartesian and natural coordinates to accomplish this is