Download
1 / 14
160 likes | 512 Views
Dive into the world of autonomous mobile robots with this comprehensive course. Learn the fundamental concepts, from vehicle actuators to path planning, through hands-on assignments and engaging projects. Gain insights from industry-leading textbooks to master the art of robotics. Join us for an exciting journey into the future of robotics technology!

E N D
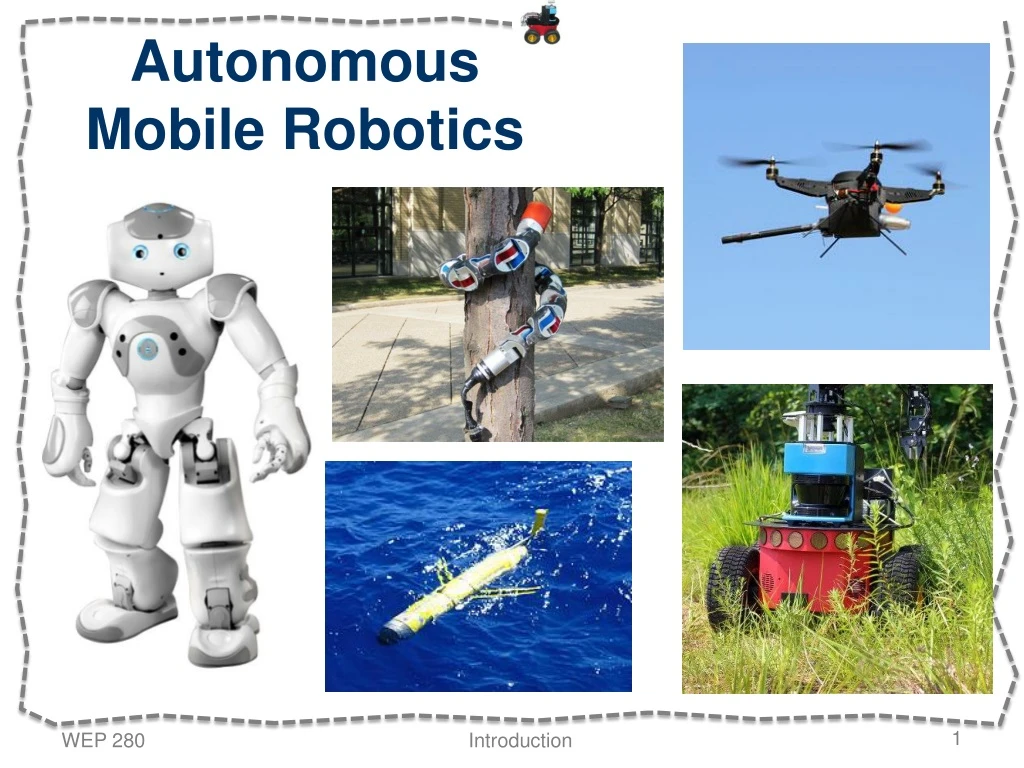
Autonomous Mobile Robotics Introduction
People • Lecturers • Daniel Asmar (da20@aub.edu.lb ) • SevagBabikian(sb56@aub.edu.lb ) Introduction
General Information • Textbooks (references) • Kelly, A. Mobile Robotics: Mathematics, Models, and Methods. Cambridge University Press, 2013 • Siegwart, Nourbakhsh, and Scaramuzza. Introduction to Autonomous Mobile Robots, MIT Press, 2nd edition, 2011. • Thrun, S. , Burgard, W., Fox, D. Probabilistic Robotics, MIT press, 2005. Introduction
Homework & project Assignmentsare given for you to practice and learn the theory and labs . These are group-based assignments. A project where you will work in teams of 3 students. I expect this to be the most fun part of the course. The outcome of the project will be showcased in the symposium. The project this year is one of a maze solving problem. Introduction
Timetable Introduction
Timetable Introduction
Introduction to mobile robotics Introduction
What is a robot? • A robot is a mechatronics system that can perform a task independently. • Robots can be: • autonomous or • semi-autonomous or • remote-controlled. • Robot are can be broadly categorized as: • static (such as industrial robots), or • mobile (which can move around in their environment) Introduction
Static versus Mobile Static (Industrial) Mobile Introduction
Autonomous mobile robots autonomy Vehicle Actuators Vehicle model Sensors Control Vehicle autonomy Path & motion planning Localization Perception Independent from user Localization & mapping Independent from environment Introduction
Darpa Grand ChallengeTeam Odin (Virginia Tech) 3rd place Introduction
Model & Actuation • Model: • Ford Escape • 2.5L • 6 speed automatic transmission • Ackerman steering • Actuation • Steer-by-wire • Brake-by-wire • Throttle-by-wire • Manual override Introduction
Sensors Introduction
Team Odin Introduction