Download
1 / 53
590 likes | 813 Views
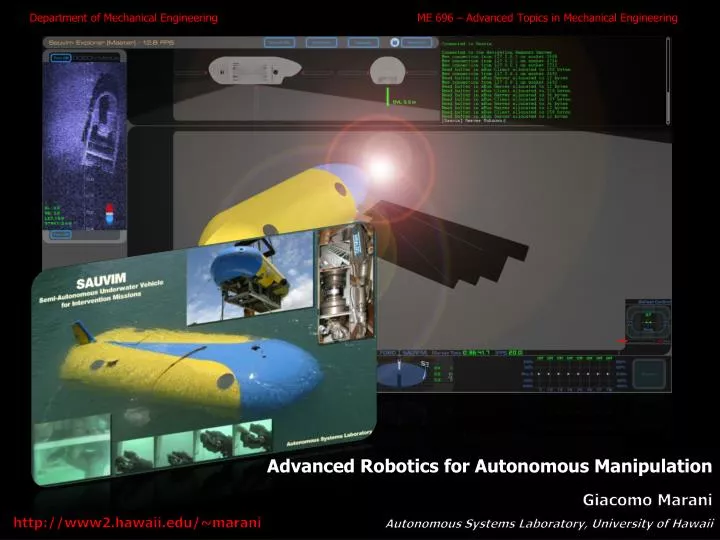
Department of Mechanical Engineering ME 696 – Advanced Topics in Mechanical Engineering. Advanced Robotics for Autonomous Manipulation. Giacomo Marani Autonomous Systems Laboratory, University of Hawaii. http://www2.hawaii.edu/~marani. 1. Course Objectives

E N D
Department of Mechanical Engineering ME 696 – Advanced Topics in Mechanical Engineering Advanced Robotics for Autonomous Manipulation Giacomo Marani Autonomous Systems Laboratory, University of Hawaii http://www2.hawaii.edu/~marani 1
Course Objectives • Autonomous Robotics, a challenging technology milestone, refers to the capability of a robot system that performs intervention tasks requiring physical contacts with unstructured environments without continuous human supervision. • Such a robot system underlies several emerging markets and applications, including security and rescue operations, space and underwater applications, military applications, and the health-care industry.
Course Objectives • This course intends to provide graduate students with advanced methods in robotics suitable for autonomous operation, such as task prioritization, auto-calibration and target interaction. • Advanced Robotics for Autonomous Manipulation will offers to the students the unique possibility of interacting with a sophisticated autonomous robotic system (the SAUVIM Autonomous Underwater Vehicle-Manipulator system), to perform individual and group experimental activities as part of the course.
Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples The SAUVIM Project • SAUVIM has been jointly developed by the Autonomous Systems Laboratory (ASL) of the University of Hawaii, Marine Autonomous Systems Engineering (MASE), Inc. in Hawaii, and Naval Undersea Warfare Center Division Newport (NUWC) in Rhode Island. • SAUVIM’s main goal is to perform autonomous underwater intervention tasks. • Research key points: • Autonomous Navigation • Vehicle localization • Autonomous Manipulation • Target localization Introduction Autonomous Underwater Intervention 4
SAUVIM Semi-Autonomous Underwater Vehicle for Intervention Missions 5
SAUVIM Semi-Autonomous Underwater Vehicle for Intervention Missions 6
Autonomous Underwater Intervention Introduction 7
Semi-Autonomous Concept • Autonomy Level: • The level of autonomy is related to the level of information needed by the system in performing the particular intervention. • The user provides only few high level decisional commands • The management of lower level functions (i.e. driving the motors to achieve a particular task) is left to the onboard system. • This concept requires the system being capable of acting and reacting to the environment with the extensive use of sensor data processing.
SAUVIM Manipulation Subsystem • Sauvim Explorer User interface: • Sensor Data monitoring system • VR underwater scene reconstruction • Actuators power control • Arm Programming Language console • Teleoperation or autonomous mode • Simulation mode xBus Communication Subsystem (Client/Server architecture) • Maris 7080 Underwater Manipulator • Manufacturer: Ansaldo DNU, Italy • 7+1 degrees of freedom • Designed for underwater applications at high depths (oil filled with compensating system) • Brushless motor with reduction unit • Two resolvers for each joint (motor and joint) • JR3 Force/Torque sensor • High positioning accuracy and repeatability Actuators power control
Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples • Specifications • Manufacturer: Ansaldo DNU, Italy • 7+1 degrees of freedom • Designed for underwater applications at high depths1 (oil filled with compensating system) • Brushless motor with reduction unit (harmonic drive) • Two resolvers for each joint (motor and joint) • JR3 Force/Torque sensor • High positioning accuracy and repeatability MARIS 7080 Robotic Manipulator MARIS 7080 specifications 1 The manipulator theoretical working depth is 4000m, calculated on the basis of characteristics of sealing components. 10
Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples MARIS 7080 Robotic Manipulator MARIS 7080 kinematics MARIS 7080 kinematics 11
Writing `Welcome` SD010
Sensor fusion • Locating the target: • Long range: sidescan sonar, imaging sonar • Medium/short range: DIDSON • Short range: motion trackers, camera, JR3 force sensor • Extensive use of the sensor data within the arm programming language environment xBus Communication Subsystem
Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples • Target localization with Motion trackers • High Accuracy and short distance • Ultrasonic 6 DOF tracker Target localization Motion Trackers 14
Underwater Demo #2 Deploying an object • Localizing a chessboard • The arm picks the object to deploy from the vehicle • The arm the arm scans around in order to look for the chessboard • Once the chessboard is detected, the arm deploys the object over it.
Underwater Demo #3 Cutting the cable • Localizing and cutting a cable • The arm scans around in order to look for the ball • Once the ball is detected, the arm attempts to position the gripper about 5 inches over the ball. • When no movement is detected from the camera-arm system, the arm proceeds cutting the cable (open gripper, move forward of 2 inches, close gripper).
Demo SD023: Target Recovery [October 2006] • The arm scans around in order to look for the target • Once the target is detected, the arm attempts to clamp the hook (tied to a cable) in between the 2 spheres.
Demo SD025: Target Tracking [July 2008] • The vehicle deploys the arm and scans the area in search for the target • Once the target is detected, the whole vehicle-manipulation system attempts to lock the target and point the end-effector to it
Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples • Course Topics • Geometry and kinematics of robotics structures: a generalized approach for multi-body systems. • Task space controller: Task Projection method and prioritization in autonomous systems. • Robotics advanced dynamics: Lagrange equation for quasi-coordinates. • Identification of system dynamics. • Dynamic control of manipulators. • Methods for target identification and tracking. • Target interaction and force control. • Autonomous Calibration of robotic systems. • Experimental activities with the RDS simulation tool and with the SAUVIM robotic manipulator. ME696- Advanced Robotics Topics 24
Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples • The Simulation Environment: • Combined use of Simulink® and Robotics Developer Studio1 • High-level language, with a minimum amount of manual coding. • Automatic use of a symbolic processor for evaluating any relation referring any kinematical and/or dynamical quantity (transformation matrixes, jacobians…) . • Automatic code optimization for real-time operation. . 1G. Marani: “ROBOSIM: Un programma per la SimulazionediStruttureMeccanicheRobotizzate”, Master thesis (in Italian), University of Pisa, Italy, February 1997 Simulation Environment Simulink and RDS 25
Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples Simulation Environment Robotics Developer Studio 26
Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples • RDS: main features • Kinematic and dynamic modeling of any generic mechanical systems (open and branched chains). • Fully integrated in the Matlab™/Simulink™ environment. • Automatic C code generation, highly optimized and ready to download on a external hardware device. • Easy-to-use graphical interface, developed for Windows NT-2000-XP™ operating systems. • Holonomic joints up to 6 degrees of freedom. • Run-time specification of physical parameters (mass, lengths …), useful for systems identification. • High-level expression editor for creating user defined Simulink blocks. Simulation Environment Robotics Developer Studio 27
Link 5 Joint 5 Link 3 Joint 3 Link 2 Joint 2 Link 1 Joint 1 Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples • RDS: Simple application example • 5 Degrees of freedom linear chain. Simulation Environment Robotics Developer Studio 28
Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples • RDS: Expression Editor • High-level interface useful to create blocks which input-output relation is definable by the user. Simulation Environment • The relation may involve any kinematical or dynamical matrix of the system, such as transformation matrixes, jacobians etc. • Example: a block that computes the generalized velocity of the end-effector of a 4-links structure: Robotics Developer Studio 29
Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples • RDS: Vehicle Simulation • RDS can model more general mechanical systems than robots. The following example is an overall simulation of the vehicle with the arm, in empty space and without gravity. Simulation Environment Robotics Developer Studio 30
Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples Course Organization Course Schedule: Tue-Thu, 3:00 PM – 4:15 PM Instructor: Dr. Giacomo Marani Office: Holmes 202 Office Hours: Mon-Fri, 3:00 PM – 5:00 PM Tel.: 956-2863 e-mail: marani@hawaii.edu Web: http://www2.hawaii.edu/~marani Credits: 3, letter grade Prerequisites: MATH 407, and ME452; or consent Textbook: Course notes Grade Evaluation: Homework Assignments: 70% Project: 30% ME696- Advanced Robotics Organization 31
Contents Introduction 1. SAUVIM Design 2. Aut. Manipulation 3. Maris 7080 Robot 4. Target Localization 5. Course Topics 6. RDS 7. Course Organiz. Examples Examples Video clips of SAUVIM Demos 32
SD001 - SD024 SAUVIM Demos
Arm Drawing, 2001 Demo SD007
Writing `Welcome` SD010
Underwater Demo #2 Deploying an object • Localizing a chessboard • The arm picks the object to deploy from the vehicle • The arm the arm scans around in order to look for the chessboard • Once the chessboard is detected, the arm deploys the object over it.
Underwater Demo #3 Cutting the cable • Localizing and cutting a cable • The arm scans around in order to look for the ball • Once the ball is detected, the arm attempts to position the gripper about 5 inches over the ball. • When no movement is detected from the camera-arm system, the arm proceeds cutting the cable (open gripper, move forward of 2 inches, close gripper).
Underwater Demos #4-5: Recovery operation (October 2006) • Target recovery • The arm scans around in order to look for the target • Once the target is detected, the arm attempts to clamp the hook (tied to a cable) in between the 2 spheres.