Download
1 / 55
550 likes | 679 Views
Redes Industriais. Redes industriais são necessárias devido à crescente informatização das empresas Todas as etapas do processo produtivo devem ser informatizadas O projeto do produto A produção em escala industrial O controle de qualidade

E N D
Redes Industriais • Redes industriais são necessárias devido à crescente informatização das empresas • Todas as etapas do processo produtivo devem ser informatizadas • O projeto do produto • A produção em escala industrial • O controle de qualidade • O controle do estoque de peças ou da matéria-prima usada para produção • O sistema de vendas ou de encomenda do produto • O objetivo final é aumentar a eficiência, reduzindo os custos de produção, venda e distribuição do produto
O Processo de Produção • O processo de produção passa por várias etapas executadas por diferentes elementos presentes no ambiente industrial • A tendência no ambiente industrial é de se ter vários subsistemas com uma certa autonomia, com cada um sendo responsável por parte do processo de produção • Tipos de equipamento presentes em cada subsistema do ambiente industrial são bastante diversificado • Computadores são usados p/ projeto e supervisão • Controladores de alto nível coordenam todo o processo de produção • No chão de fábrica são usados robôs, esteiras, tornos, sensores, atuadores ...
Uso de Redes no Ambiente Industrial • Redes são usadas para integrar os equipamentos presentes em um determinado subsistema reponsável por parte do processo de produção • Cada subsistema adota o tipo de rede mais adequado para si levando em conta o tipo de equipamento que utiliza e os requisitos da atividade que executa • Subsistemas devem estar interligados para que sejam feitos a coordenação das atividades e a supervisão do processo produtivo como um todo • Resultado: não existe um tipo de rede que seja capaz de atender a todos os requisitos dos diversos subsistemas existentes em um ambiente industrial
Requisitos de Redes Industriais • Os requisitos do ambiente industrial e seus processos de produção são geralmente diferentes daqueles presentes em redes locais de computadores • Tipos de rede específicos para o ambiente industrial podem ser necessários • Exemplo de requisitos de redes industriais: • Boa resistência mecânica • Resistência a chama, umidade e corrosão • Alta imunidade a ruídos • Taxa de erros baixa ou quase nula • Tempo de acesso e de propagação limitados • Tempo entre falhas e tempo de reparo baixos • Boa modularidade e possibilidade de interconexão
Custo Erro Distância Taxa de Transm. Resist. Mecânica Par trançado (2 fios) baixa Par trançado assíncrono (4 fios) baixa Cabo coaxial alta Fibra ótica baixa Meio de Transmissão • Em ambiente industrial geralmente se usa codificação digital por variação da corrente (4-20mA) por esta ser menos susceptível a interferências eletromagnéticas
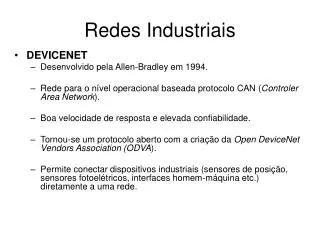
A Arquitetura MAP/TOP • MAP: Manufacture Automation Protocol • Iniciado em 1980 por iniciativa da GM, logo contando com a adesão de HP, DEC, IBM, etc. • Busca interligar equipamentos desde o chão de fábrica até o nível de vendas, permitindo que pedidos de compra resultem automaticamente na manufatura e entrega do produto • TOP: Technical and Office Protocol • Surgiu em 1983, criado pela Boeing • Tem por finalidade automatizar a parte técnico-administrativa de empresas, com soluções para comunicação entre usuários, edição de texto, CAD, bases de dados e trabalho cooperativo • MAP e TOP se uniram em 1986
TOP MAP Aplicação VTP, DS, FTAM VTP, DS, FTAM +MMS Apresentação ISO 8822 – ASN.1 Sessão ISO 8326/8327 Transporte ISO 8073 – TP4 Rede ISO 8473 (IP modificado) IEEE802.2–LLCtipo1IEEE802.3–CSMA/CD IEEE802.2–LLCtipo1IEEE802.4–TokenBus Enlace Física Banda de Base Banda Larga As Camadas MAP/TOP
As Camadas Física e de Enlace • Camada Física • MAP: transmissão em banda larga • TOP: transmissão em banda de base • Camada de Enlace • MAP: usa Token Bus (também pode operar com Token Ring); controle de acesso por ficha; tempo de acesso determinístico • TOP: usa CSMA/CD Ethernet; barramento com colisões; não-determinístico • Ambos usam LLC tipo 1 (IEEE 802.2) no enlace lógico
As Camadas de Rede, Transporte e Sessão • Camada de Rede • ISO 8473, baseado no IP mas com formatos de endereços e quadros ligeiramente diferentes • Protocolo sem conexão e sem correção de erros • Camada de Transporte • ISO 8073 – protocolo de transporte nível 4 (TP4) • Com conexão, controle de erros e de fluxo, com fragmentação e reordenamento de mensagens • Fornece um canal confiável de transmissão • Camada de Sessão • ISO 8326/8327 • Serviço de comunicação full-duplex e com resincronização
As Camadas de Apresentação e de Aplicação • Camada de Apresentação • ISO 8822 • Representação de dados no formato ASN.1 • Camada de Aplicação • MAP: MMS (Manufacture Message Service) • TOP: E-mail, colaboração, etc. • Em ambos: • VTP: terminal virtual • DS: serviço de diretório • FTAM: tranferência de arquivo
MAP EPA Mini-MAP Aplicação FTAM, VTP, DS, MMS, etc. Apresentação ISO 8822 Sessão ISO 8326/8327 Inexistentes Inexistentes Transporte ISO 8073 Rede ISO 8473 LLC 802.2 tipo 1MAC Token Bus LLC 802.2 tipo 1MAC Token Bus LLC tipo 1 ou 3MAC Token Bus Enlace Física Banda Larga Banda Base Banda Base Variantes do MAP
MAP/EPA • Provê duas pilhas de protocolos • A pilha MAP contém todas as camadas do MAP convencional • A pilha EPA contém somente as camadas de aplicação, de enlace e física • EPA: Enhanced Performance Architecture • MAP/EPA usa banda de base a 5 Mbits/s ao invés de banda larga como no Token Bus original • No EPA os serviços de aplicação são construídos diretamente sobre a LLC tipo 1
Mini-MAP • Mini-MAP suprime completamente as camadas de rede, transporte, sessão e apresentação do OSI • Evita o alto custo das 2 pilhas de protocolos que ocorre no MAP/EPA • Como no EPA, serviços de aplicação são construídos diretamente sobre o enlace • Também é usada banda de base a 5 Mbits/s • A diferença se encontra no uso de LLC tipo 3 (datagrama com reconhecimento) além do tipo 1 • Com reconhecimentos a nível de enlace, a implementação de serviços de aplicação é facilitada • Mini-MAP é usado na comunicação entre elementos mais simples como sensores e atuadores
MMS • Serviço de Mensagens de Manufatura • Conjunto de serviços de comunicação oferecido a aplicações industriais • Usado na interação entre equipamentos industrias programáveis como robôs, tornos, controladores, etc. • Provê mecanismos para: • Carga remota de programas • Controle remoto de equipamento • Elaboração de relatórios de produção • etc.
Modelo MMS • Equipamento virtual de manufatura (VMD) • Representa o equipamento real de produção • Recursos do equipamento são modelados como objetos virtuais • Recursos podem ser acessados através dos pontos de acesso a serviço (SAPs) do VMD • Processo de aplicação (AP) • Usuário dos serviços MMS • Possui um ou mais VMDs • Se comunica com outros APs de acordo com o modelo cliente-servidor • O cliente requisita a operação no servidor • O servidor executa a operação
Serviços MMS • MMS possui 84 primitivas de serviço utilizadas para: • Estabelecimento e manutenção de diálogo entre usuários MMS • Obtenção de informações sobre VMDs • Carregamento e armazenamento de programas e dados em equipamentos de produção • Execução remota de programas em VMDs • Gerenciamento do acesso concorrente a recursos de produção fornecidos por VMDs • Interação com o operador do equipamento • Definição e tratamento de eventos de produção • Criação de relatórios sobre o funcionamento da célula de produção
Fieldbus • Fieldbuses eliminam a necessidade de se utilizar várias interfaces ponto-a-ponto, uma para cada equipamento • Fieldbuses substituem as interfaces digitais ponto-a-ponto (como RS232, RS422, etc.) por um barramento ao qual todos os equipamentos são conectados • Os fieldbuses são geralmente usados na comunicação em ambiente industrial e veicular • Existem diversos tipos de fieldbus • Profibus (norma alemã) • ISA SP-50 (norma americana) • FIP (norma francesa) • etc.
Controlador Controlador IF IF Placa de Rede A S A A A S S S A S Processo Industrial A S Processo Industrial Estrutura Física de Fieldbuses Sist. de Controle Tradicional X Sist. de Controle com Fieldbus
Vantagens dos Fieldbuses • Reduzem a cabeamento e o número de interfaces usadas • Limitam a complexidade do projeto da rede • Reduzem o número de canais de comunicação entre os processos de controle e o equipamento industrial • Maior modularidade da rede, facilitando sua expansão • Facilidade de instalação e de manutenção • Tempo de acesso (1-10ms) menor que de MAP/EPA e Mini-MAP (100ms) devido a sua menor complexidade • Baixo custo, o que torna os fieldbuses ideais para inteligação de componentes mais simples • Maior compatibilidade devido ao uso de padrões • Eliminação da dependência de um só fornecedor, reduzindo ainda mais os custos devido à competição
Arquitetura Genérica de Fieldbuses • Assim como em MAP/EPA e Mini-MAP, as camadas de 3 a 6 são suprimidas da pilha • As funções indispensáveis para comunicação executadas pelas camadas suprimidas são absorvidas pelas camadas 2 (enlace) e 7 (aplicação) • Os cabeçalhos e terminadores de mensagens são reduzidos ao estritamente necessário para aproveitar da melhor forma possível a capacidade de transmissão • O mecanismo de acesso ao meio deve propiciar um tempo de acesso limitado (determinístico)
FIP • FIP = Factory Instrumentation Protocol • Padrão proposto pelo governo Francês + empresas • Procura levar em conta as restrições de tempo das aplicações de chão de fábrica • Segue um modelo de transmissão do tipo produtor-consumidor com controle de acesso centralizado • Pode ser encontrado em chips que implementam as 3 camadas do padrão FIP
Camada Física • Meios de transmissão usados pelo FIP • Par trançado (blindado ou não) • Fibra ótica • Velocidades de transmissão • S1: 31.25 Kb/s, para distâncias de até 2000m • S2 (padrão): 1Mb/s, <500m, par trançado blindado • S3: 2.5 Mb/s, <200m, par trançado blindado • Usa codificação Manchester (relógio + dados) • Suporta até 256 estações • O barramento pode ser dividido em segmentos interligados por repetidores
Camada de Enlace • Transmissão no FIP é totalmente baseada em difusão (broadcasting), segundo o princípio de que um dado pode interessar a várias estações • As mensagens trocadas pela rede têm a forma de variáveis que tem seu valor definido por um produtor e são usadas por um ou mais consumidores • Um “Árbitro do Barramento” controla o acesso ao meio definindo que variável deve ser transmitida em um determinado instante; o produtor então a envia, e os consumidores lêem o seu valor • Endereços não são utilizados: o produtor sabe que variáveis produzir, e estas são difundidas na rede para todos os possíveis consumidores
Camada de Aplicação • FIP possui um subconjunto das mensagens industriais definidas pelo padrão MMS • Possui ainda uma família de serviços denominada MPS (Message Periodic/aperiodic Services) • Serviços MPS são usados para ler/escrever valores de variáveis ou listas destas, ler descrições das variáveis, e para fazer sincronização dos elementos da rede • FIP possui ainda uma série de funções de gerenciamento da rede usadas para definir variáveis, detectar e corrigir falhas, etc.
Profibus • Profibus = Process Field Bus • Criado por iniciativa da Siemens, Bosch, e Klockner-Moeller em 1987 • Norma Alemã DIN V19245 • Suportado por >100 empresas • A comunicação pode ser: • com conexão: comunicação confiável • sem conexão: para broadcast ou multicast
Camada Física • Usa interface padrão RS-485 e barramento de par trançado blindado de 130 • O barramento pode ser dividido em até 4 segmentos • Cada segmento pode ter até 32 elementos, resultando em um máximo de 128 elementos por barramento • Usa codificação tipo NRZ • Velocidades de transmissão: • 9.6, 19.2 e 93.75 Kb/s para distância < 1200m • 187.5 Kb/s para distância < 600m • 500 Kb/s para distância < 200m
CRC Fim Início Destino Origem Controle ... Dados ... Camada de Enlace • Usa método mestre/escravo combinado com passagem de ficha para controlar o acesso ao meio • estações mestres dispostas em um anel lógico no qual o acesso é controlado por passagem de ficha • estações escravas só acessam o meio por ordem do mestre de posse da ficha • Quadros são formados por caracteres UART (11 bits) • A transferência dos dados é feita sempre com confirmação positiva por parte do receptor
Camada de Aplicação • Usa subconjunto MMS chamado FMS (Fieldbus Message Specification) • Possui ainda serviço FMA (Fieldbus Management) para gerenciamento da rede • LLI (Lower Layer Interface) faz a conexão com a camada de enlace • ALI (Application Layer Interface) fornece uma interface de mais alto nível para as aplicações
ISA SP-50 • ISA SP-50 = Instrumentation Society of America Standard & Practices 50 • Candidata a se tornar o padrão mundial • Camada Física: • Meio de transmissão • H1: par trançado a 31.25 Kb/s em topologia de barramento ou estrela • H2: par trançado a 1Mb/s em barramento e distância máxima de 750m com 30 estações • Adaptações permitem uso de fibra ótica e rádio • Condificação em Manchester
Camada de Enlace • Controle de acesso por ficha + mestre/escravo • Tipos de estação: • Iniciadoras podem pedir ficha e transmitir • Escravas só transmitem quando solicitado • Mestres podem agir como iniciadora ou escrava; elegem um líder que controla o acesso • Pontes interligam segmentos de rede • Líder autoriza estações que solicitaram ou reservaram acesso a transmitir ou circula a ficha entre mestres • Serviços de enlace • Transmissão de dados com ou sem conexão • Gerenciamento de buffers de dados • Escalonamento de acesso ao meio
Camada de Aplicação • Serviços MCSE (Message Common Service Element): estabelece e interrompe conexões entre aplicações • Serviços IMSE (Industrial Message Service Element): semelhante ao MMS • Serviços DDM (Distributed Database Maintenance): permite o acesso a bases de dados distribuídas • Serviços de Geranciamento: controla inicialização de endereços, sincronização, escalonamento, faz diagnóstico de erros, otimiza desempenho, etc. • Além da camada de aplicação, o SP-50 possui uma camada de usuário, que fornece uma interface amigável para o programador de aplicações
CAN • CAN = Controller Area Networks • Proposto pela Bosch • Normas ISO 11519 e 11898 • Desenvolvido inicialmente para veículos, mas devido à sua comprovada confiabilidade e robustez também está sendo adotado em aplicações industriais • Existem implementações em um só chip (Intel 85526, Philips 82C200, Motorola 68HC05, NEC 72005, etc.) • Tem baixo custo: menos de $10 por nó
Camada Física • Usa par trançado (blindado ou não) ou fibra ótica • Velocidade de até 1Mb/s dependendo da distância • Suporta até 32 nós por barramento • Usa codificação NRZ • Linhas CAN_H e CAN_L • se voltagem em CAN_H > CAN_L => bit 1 • se voltagem em CAN_L > CAN_H => bit 0 • Confiável: continua funcionando mesmo se • um dos cabos é rompido • um dos cabos é conectado ao sinal elétrico • um dos cabos é conectado ao terra
Camada de Enlace • Acesso ao meio CSMA/CD com resolução de colisão • Mensagens são identificadas por um rótulo e trazem um dado (valor) correspondente; rótulos menores significam que a mensagem tem maior prioridade • Quando duas estações tentam transmitir ao mesmo tempo, a prioridade define que mensagem deve prevalecer; a mensagem de menor prioridade deve aguardar para ser transmitida • Estações não possuem endereços: mensagens são difundidas na rede e estações interessadas as lêem • Mensagens tem campo de dados de no máx. 8 bytes • É possível requisitar um certo dado enviando uma mensagem com o rótulo correspondente e marcando o bit RTR (remote transmission request) da mensagem
Camada de Aplicação • Camada de aplicação não é definida pelo padrão CAN • Áreas de aplicação diferentes definem seus próprios protocolos de aplicaçãoExemplo: protocolo DeviceNet para interconexão de CLPs e sensores inteligentes • Os rótulos para identificação de mensagens também são padronizados para cada área de aplicaçãoExemplo: a indústria de motores define que o identificador 00000010000 representa a corrente no motor, enquanto 00000010001 representa a velocidade medida pelo tacômetro
Camada de Aplicação • O grupo CiA (CAN in Automation) definiu uma estrutura de camada de aplicação para o uso de redes CAN no ambiente insdustrial • CMS: CAN Message Services • Fornece serviços de leitura/escrita de variáveis e tratamento de eventos • Baseado no MMS • NMT: Network Management • Serviços de inicialização e gerenciamento da rede • DBT: Distributor • Serviços de identificação dinâmica de mensagens com base em nomes definidos pelos usuários
Bitbus • Desenvolvido pela Intel, tornou-se padrão IEEE 1118 • Alternativa para os Fieldbuses • Integra os componentes de nível mais baixo: sensores, atuadores e instrumentos de medição • Camada Física • Topologia: barramento • Interface: RS-485 • Velocidade: até 2.4 Mbps em modo síncrono (4 fios) ou 1 Mbps em modo assíncrono (2 fios) • Cada segmento suporta até 28 estações • Uso de repetidores permite conectar até 250 elementos na rede
Camadas de Enlace e Aplicação • Camada de Enlace • Acesso ao meio mestre/escravo • Protocolo SDLC (Synchronous Data Link Control), implementado pelo processador Intel 8044 • Camada de Aplicação • Serviços RAC (Remote Acess and Control): permitem o controle e o acesso a sensores e atuadores
Interbus • Desenvolvido pela Phoenix Contact, da Alemanha • Várias outras empresas fabricam produtos compatíveis • Está sendo padronizado pela DIM e pela IEC • Usado para interligação de sensores e atuadores a um elemento inteligente (CLP, CNC, etc.) • Caracterísiticas Físicas: • Topologia: anel • Número máximo de estações : 256 • Distância: até 13 Km sem repetidores; até 400m entre duas estações consecutivas • Taxa de transmissão: 500 Kbps
Camada de Enlace • Método de acesso mestre/escravo • Um quadro com campos destinados a cada escravo, chamado quadro concatenado, circula no anel • Cada escravo verifica o campo destinado a ele, altera o valor do campo se julgar necessário, e repassa o quadro para o escravo seguinte • O processo se repete até que o quadro passe por todos os escravos e retorne ao mestre • O tempo de varredura dos escravos é determinista, obtido em função do número de escravos no anel
Camada de Aplicação • PMS: Peripheral Message Services • Subconjunto do MMS • Gerencia conexões • Gerencia objetos • Identifica e verifica o estado do sistema • Permite o acesso a variáveis • Gerencia a carga de programas
AS-I • Actuator/Sensor Interface • Desenvolvida por um consórcio de 11 empresas • Usada para interligação de elementos binários (sensores, atuadores, botões liga/desl., relés, etc.) a um elemento inteligente (CLP, CNC, PLC, PC, etc.) • Vantagens: baixo custo e simplicidade • Pode ser interconectada com CAN, Profibus, FIP, Interbus, RS-232, RS-485, etc.
Camada Física • Topologia: mista - estrela, série, barra, árvore, ou uma combinação destas topologias • Módulos com um chip AS-I permitem a conexão de elementos binários à rede • Cada módulo pode ter até 4 entradas e 4 saídas digitais de 1 bit • Meio de transmissão: cabo com 2 fios, também usado para alimentar os módulos com 24V DC • Número de módulos: máximo de 31 • Tamanho do segmento: até 100m por segmento (300m com repetidores) • Tempo de varredura dos módulos: máximo de 5 ms (frequência de operação: 167KHz)
Camada de Enlace • Método de acesso mestre-escravo • O elemento inteligente executa a função de mestre • Cada módulo assume o papel de um escravo • Escravos são contactados de maneira cíclica: • Mestre envia quadro de 17 bits (4 bits de dados, um para cada porta de entrada) ao escravo • Se for necessário, o escravo responde com quadro de 7 bits (4 bits de dados, um para cada saída) • Detecção de erro: bit de paridade nos quadros • Endereço dos escravos: 5 bits (valor de 1 a 31)
GPIB • GPIB (General-Purpose Interface Bus) é o principal tipo de rede de instrumentação disponível no mercado • Criado pela HP • Tornou-se a norma IEEE 488.1 / IEC 625-1 • Problemas para uso em redes industriais: • Cabos e interface caros • Sinal sensível a perturbações • Barramento curto (<20m)
Camada Física • Meio de transmissão: barramento paralelo c/ 16 linhas • 8 para dados • 3 para controle (handshake) • 5 para gerenciamento • Codificação • Sinal > 2V => Bit 0 • Sinal < 0,8V => Bit 1 • Cada baramento pode ter até 15 estações • Comprimento máximo: 20m • Taxa de transmissão: 1Mbps
Camada de Enlace • Método de acesso mestre/escravo • Estação controladora (mestre) coordena o acesso ao barramento • Define a estação emissora e a(s) estação(ões) receptora(s) para cada janela de transmissão
Ethernet Industrial • As redes Ethernet, que são o padrão usado em >95% das redes locais de computadores, estão sendo usadas também no chão de fábrica • Vantagens: • Baixo custo ($10-20) • Grande disponibilidade no mercado • Compatibilidade entre fabricantes diferentes • Facilidade de interconectar com o resto do processo industrial • Problema: como o método de acesso usado é por colisão, não existe um limite de tempo de propagação • Diversas soluções estão sendo adotadas para limitar o o tempo de propagação de mensagens
Cód. Erro 101010...101011 Dados Destino Tam. Origem Prench. O Padrão Ethernet • O padrão define as características do meio físico e a camada de acesso ao meio • Usa cabo coaxial de 50 (máx. 500m, 100 máquinas); também podem ser usados par trançado e fibra ótica • Velocidades de 1, 10, 100 Mb/s ou 1 Gb/s • O quadro de dados tem o seguinte formato: • Na camada MAC é usado o método de acesso múltiplo com detecção de colisão 1-persistente 8 bytes 2 ou 6 2 ou 6 2 0-1500 0-46 4 bytes
Limitação do Tempo de Propagação • São usadas técnicas para contornar o problema do tempo de resposta ilimitado • Técnica de Limitação da Carga • O número de elementos no segmento é limitado • Se mais elementos precisam ser interconectados à rede, estes são colocados em um segmento em separado interconectado por uma ponte • O tráfego é mantido em <2% da capacidade total • Com isso, o número de colisões é bastante reduzido e o tempo de resposta se mantém aproximadamente constante