Download
1 / 1
10 likes | 127 Views
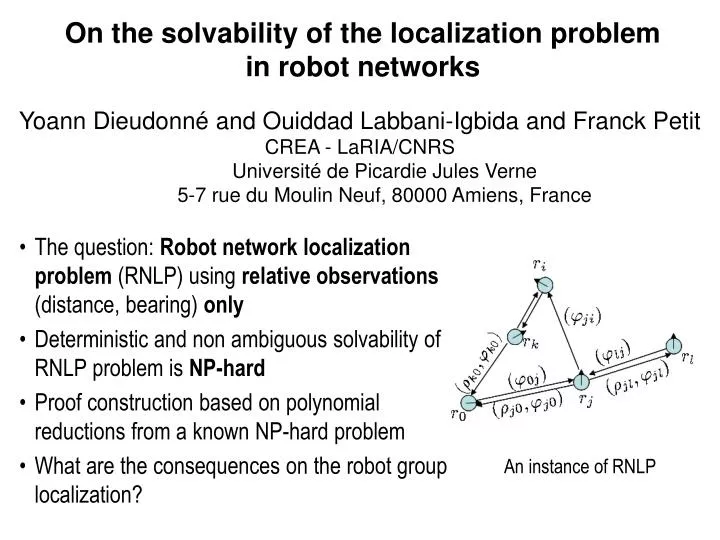
On the solvability of the localization problem in robot networks. Yoann Dieudonné and Ouiddad Labbani-Igbida and Franck Petit CREA - LaRIA/CNRS Université de Picardie Jules Verne 5-7 rue du Moulin Neuf, 80000 Amiens, France.

E N D
On the solvability of the localization problem in robot networks Yoann Dieudonné and Ouiddad Labbani-Igbida and Franck Petit CREA - LaRIA/CNRS Université de Picardie Jules Verne 5-7 rue du Moulin Neuf, 80000 Amiens, France • The question: Robot network localization problem (RNLP) using relative observations (distance, bearing) only • Deterministic and non ambiguous solvability of RNLP problem is NP-hard • Proof construction based on polynomial reductions from a known NP-hard problem • What are the consequences on the robot group localization? An instance of RNLP