Download
1 / 28
280 likes | 297 Views
This presentation discusses the problem of robot localization and introduces a novel panorama approach that works in unstructured environments. Results and demonstrations show the effectiveness of the approach in various locations.

E N D
Robot Compagnion Localization at home and in the office Arnoud Visser, Jürgen Sturm, Frans Groen University of Amsterdam Informatics Institute
Overview • Mobile robotics • Robot localization • Presentation of the panorama approach • Results • Demonstration videos
Mobile robotics Robot cranes and trucks unloading ships Port of Rotterdam Sony Aibos playing soccer Cinekids, De Balie, Amsterdam SICO at Kosair Children's Hospital Dometic, Louisville, Kentucky RC3000, the robocleaner Kärcher
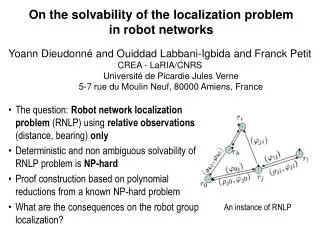
The localization problem • Robot localization .. is the problem of estimating the robot’s pose relative to a map of the environment. • Position tracking • Global localization • Kidnapping problem
Localization • Sensors • Odometry, GPS, Laserscanner, Camera.. • Feature space • World representation • Topological graphs, grid-based maps • Filters • Kalman filters, particle filters
Classical approaches • Special environments • (Visual) landmarks • (Electro-magnetic) guiding lines • Special sensors • GPS • Laser-scanners • Omni-directional cameras • Special requirements • Computationally heavy (offline computation)
New approach • Natural environments • Human environments • Unstructured and/or unknown for the robot • Normal sensors • Camera • Reasonable requirements • Real-time • Moderate hardware requirements
Platform: Sony Aibo • Computer • 64bit RISC processor • 567 MHz • 64 MB RAM • 16 MB memorystick • WLAN • Internal camera • 30fps • 208x160 pixels • Actuators • Legs: 4 x 3 joints • Head: 3 joints
Demo: Compass Library, University of Amsterdam
Color segmentation Raw image Sidetrack: Color Calibration • Robot collects colors from environment • Colors are clustered using an EM algorithm • Color-to-Colorclass lookup table is created for faster access Color class image
Mathematics rotation translation feature vector ideal world model learned world model
Feature vectors and world model Feature vector consists of color transition counts between the n color classes World model distribution
Feature space conversion (2) Raw image Color class image Sector-based feature vectors
Learning Update distribution of single color class transition by updating the constituting counters
Matching Likelihood of Single sector Adjacent sectors Rotation estimate Confidence estimate
Post-processing: Compass Idea: smooth rotational estimate over multiple frames + removes outliers + stabilizes estimate + integrates (rotational) odometry
Results: Compass Brightly illuminated living room
Results: Compass Daylight office environment
Results: Compass Outdoor soccer field
Results: Compass Robocup 4-Legged soccer field
Signal degradation (w.r.t. distance) Robocup 4-Legged soccer field
Post-processing: Grid localization Idea: learn multiple spots, then use confidence value to estimate the robot‘s position in between – fixed grid (better: self-learned graph based on confidence) – difficult to integrate odometry + proof of concept
Demo: Grid localization Robocup 4-Legged soccer field
Results: Grid localization Robot walks back to center after kidnap 100 75 50 25 Positioning accuracy y [cm] 0 -100 -75 -50 -25 0 25 50 75 100 -25 -50 -75 -100 x [cm] Robocup 4-Legged soccer field
Conclusions • Novel approach to localization: • Works in unstructured environments • Tested on various locations • Interesting approach for mobile robots at home and in the office