Download
1 / 19
190 likes | 213 Views
Secular motion of artificial lunar satellites. H. Varvoglis, S. Tzirti and K. Tsiganis Unit of Mechanics and Dynamics Department of Physics University of Thessaloniki. Motivation - results in a nutshell.

E N D
Secular motionof artificial lunar satellites H. Varvoglis, S. Tzirti and K. Tsiganis Unit of Mechanics and Dynamics Department of Physics University of Thessaloniki
Motivation - resultsin a nutshell • Artificial satellites are an indispensable tool for surveying celestial bodies and relaying communication signals back to Earth. • When talking about satellite orbits, most people think of ellipses. • However most of the bodies of the Solar System are not perfectly spherically symmetric, so that the orbits of their satellites are not Keplerian! • Hence, need to calculate orbits with specific properties (e.g. invariant plane of orbit, constant orientation, constant pericenter or apocenter etc.) around non-spherically symmetric bodies. • If this turns out to be difficult, at least calculate orbits with quasi-constant elements (present work).
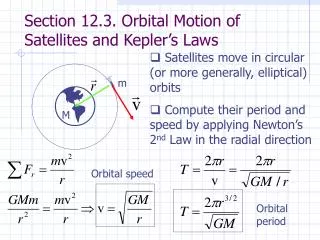
Elements of a Keplerian bounded orbit (ellipse) SIZE and SHAPE of the orbit: α, e (T 2 ~ α 3) ORIENTATION of the orbit (Euler angles): I, g, h • Satellites are used for a numberofpurposes (communications, navigation, research, intelligence, surveying, meteorology etc.) • Satellites' orbits are selected according to the specificmission ofeachsatellite Lunar satellites are used for: surveying, data transmission & communications
We perform: • Numerical calculation of lunar satellite orbits, under the effect of TWO perturbations: - inhomogeneous gravitational field of the central body (Moon) - neighbouring third body (Earth) • We see that - low orbits are affected primarily bythe inhomogeneous field - high orbits are perturbed primarily by Earth • We need to know (from theory!) where to look for: - Orbits that have at least one element constant (e.g. eccentricity,e, or argument of pericenter,g) (application: space mission design of surveying or intelligence)
Plan of the talk • Expansion of the gravitational potential in spherical harmonics • Next best integrable approximation (besides the keplerian one): two fixed centers (e.g. see Marchal, 1986) • This work: spherical harmonics up to 2nd and 3rd degree • Earth's perturbations to the motion of a lunar artificial satellite
Motion of a satellite around a spherically symmetric body: • Potential that of a point mass for r > R: V = –μ/r (μ = G M) • Keplerian (exactly elliptic orbit) • i.e. the orbit has a constant elliptical shape and orientation • Motion of a satellite around an asymmetric body: • Potential: V(r, φ, λ) = −μ/r+B(r, φ, λ) • Under the perturbation of the B-terms, the orbit is not anymore an ellipse. However if B(r, φ, λ) << μ, the orbit looks like an ellipse with slowly varying osculating elements
Including only the J2 term: the l-averaged system is 1-D -> integrableMolniya / Tundra type orbits: T=12 h / 24 h, e~0.7, I=63ο.43, apogee at constant φ
2 – FIXED CENTERS APPROXIMATION of the axisymmetric case • Method of work: expand the 2-FC potential in spherical harmonics. • The distance between the 2-FC and their masses are calculated by equating the numerical values of the J2 and J3 terms to those of the Earth. • Masses and distances turn out to be complex, but the potential is real! • The 2-FC problem is integrable. It is also “pathological”, but only for trajectories passing “between” the centers. • Satellite orbits lie in the outer region, hence the approximation is useful.
BEYOND THE AXISYMMETRIC MODEL • 1. What happens to Icif we keep the term C22(near-far side asymmetry) in the expansion of the potential? • 2. What happens to the stability of the orbits if we keep 3rdorder terms? • 3. What is the effect of Earth, as a third body, in the evolution of orbits? For the specific case of the Moon: J2/C22= 9.1 (Earth: J2/C22= 689.91)
Method of work Delaunayvariables (a.k.a. first order normalization!)
“Critical”orbitsfortheJ2 + C22 model: • The system of equations has finally 1 d.o.f. (there is no dependence on g!) • There is no I, for which condition is satisfied! • But for some I we have(quasi-critical orbits) • Iqcdepends on the angle ho (de Saedeleer & Henrard ,2006) • The rotation of the Moon weakens considerably this dependence α=RMoon+1250 km, e=0.2
Introductionof 3rdorderterms(mainlyC31) • Write the averaged Hamiltonian function in Delaunay variables • The system of equations has now 2 d.o.f. • Study the system using a Poincaré s.o.s. and indicators of chaotic behaviour(FLI) • Look for stable periodic orbits
WITHOUT rotation Poincaré map Collisionlimit
WITH rotation(a=RMoon+1250 km) Poincaré map
Summaryandconclusions • SystemwithonlyJ2: Ic=63ο.43(Molniya, critical inclination AND frozen eccentricity!) • System with J2 and J3: (either critical inclination OR frozen eccentricity) - 2-FC approximation • SystemwithJ2andC22: nomoreIc, butonlyIqc - withoutrotation: strongdependenceonho , Δg, ΔI~35o - withrotation: weakdependenceonho, Δg, ΔI~0o.05 • 3rdorderterms: - Withoutrotation: Importantchaoticregionsandcollisionorbits => noorbitsofpracticalinterest! - Withrotation: Mainlyorderedmotioninregionsofpracticalinterest (inparticularatlowheights, whereEarth's perturbationisnotimportant) => Existenceoforbitsofpracticalinterest(next talk by Stella Tzirti) HigheforI~63o LoweforanyI