Download
1 / 17
210 likes | 384 Views
Rotational dynamics. Chapter 8. Masses. Up ‘til now, we have assumed that all masses are essentially points in space. From this point onwards, we will treat all objects as extended . Rotation. We established earlier that centripetal force causes circular motion.

E N D
Rotational dynamics Chapter 8
Masses • Up ‘til now, we have assumed that all masses are essentially points in space. • From this point onwards, we will treat all objects as extended.
Rotation • We established earlier that centripetal force causes circular motion. • What causes the centripetal force in the first place?
Rotation • Remember, for all objects, we are assuming that the object rotates around a fixed axis. • Objects rotating around this axis feel the centripetal force.
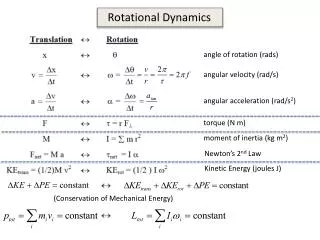
Torque • The ability of a force to rotate an object around that axis is measured by a quantity known as torque. • Torque is dependent on three things • Force • Lever arm • The angle between the two
Torque • Depending on where the force is applied, torque will increase or decrease. • Torque is a vector
Sample problem • A mechanic applies a force of 400 N at an angle of 20 degrees on this wrench. The wrench is 0.3 meters long. What is the torque?
Net Torque • Like force, there can be multiple torques on an object. • You can add those all up to find the net, or total, torque. • ∑τ=τ1+τ2+τ3+… • Keep in mind each torque can be positive or negative, so the net torque will be + or –.
Sample problem Find the net torque of all the forces on the triangle around the fixed point. (ignore the d’s and f’s in the diagram).
Rotation • The axis of rotation is easy to find for some objects. Doors, the windows in the back, all have hinges. • What if something is flying through the air?
Center of Mass • If gravity is the only force acting on something, that object will rotate about its center of mass. • This in turn means that airborne objects undergo both linear and rotational motion
Center of mass • Depending on if the object is symmetrical or not, the center of mass is either easy or hard to find.
Center of Mass • It’s easier to rotate some objects around a certain axis than others. • What’s the best way to swing a bat?
Moment of Inertia • An object’s ability to resist rotational motion is measured by its moment of inertia. • Mass and moment of inertia both resist motion • Mass resists linear • M.o.I resists rotational
Moment of Inertia • How an object is shaped determines its moment of inertia. • The further the mass is from the axis, the greater the m.o.i.