Download
1 / 14
140 likes | 684 Views
When we studied linear motion we started with the description of linear motion which we called kinematics.? From there we went on to dynamics which provided the reason for the motion, i.e. the cause or influence. In a similar fashion we introduced rotational kinematics relating t, q, w, and a.? Cont

E N D
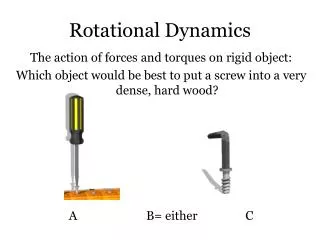
1. Rotational Dynamics I Concepts:
Rotational Torque, Moment of Inertia,
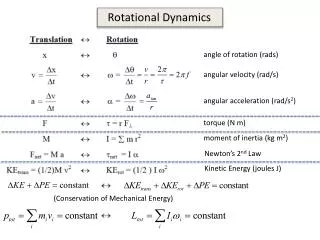
2. When we studied linear motion we started with the description of linear motion which we called kinematics.� From there we went on to dynamics which provided the reason for the motion, i.e. the cause or influence. In a similar fashion we introduced rotational kinematics relating t, q, w, and a.� Continuing the correspondence between linear and rotational motion, we now introduce rotational dynamics.
3. Concurrent Forces Forces whose line of action passes through the object�s center of mass are called concurrent forces.
4. Non-concurrent Forces Forces whose line of actions do not pass through the center of mass are called non-concurrent forces.
5. Rotational Influence Non-concurrent forces create rotation due to the creation of a torque, i.e. a twisting influence.
6. Torque Torques create rotational acceleration.
Torque has units of Nm.
Torques will either create a clockwise (-) rotation or counterclockwise (+) rotation.
Torque is a vector.
The sum of the torques is the net torque.
7. Torque (cont) A net torque results in rotational acceleration.
The amount of rotational acceleration depends upon the location of the applied forces and
The shape or distribution of the mass relative to the point of rotation.
Let�s derive the 2nd law equivalent for rotation�
8. Newton�s Law for Rotation Start with Newton�s 2nd Law:
F = ma, multiply by r,
rF = rma
substitute a = ar,
rF = rmar,
let rF = t, defined as the torque.
�t = mr2a
t = Ia,
where� I = mr2
Is defined as the moment of inertia.
9. tnet = Ia
The net torque is the vector sum of the counterclockwise and clockwise torques.
The angular acceleration, a, is the objects response to the net torque.
The moment of inertia, I, expresses the distribution of the mass relative to the point of rotation.
10. Moment of Inertia Consider two masses connected by a very thin, light rod.
11. Moment of Inertia for Point Masses I = Smiri2
Where mi are the masses and ri are their locations relative to the axis of rotation.
= Smiri2 = m1r12 + m2r22
As you can see, if the axis location changes, so does I.
12. Implications of I There is not just one moment of inertia.
It will be different for every axis of rotation chosen.
Both r and m affect the moment of inertia.
Objects located on the axis contribute nothing to the moment of inertia because r = 0.
I expresses the difficulty in causing the object to rotate. Its inertia.
13. Moment of Inertia for Common Shapes Most objects are not point masses, so the calculation of I would involve calculus. Fortunately the formula for I for most common shapes have been determined and are listed in a table in your book.
14. Rotational Force Law tnet = Ia
Use this just like you did Newton�s 2nd Law.
Identify the torques acting on the object.
Calculate the moment of inertia of the object.
Find the angular acceleration resulting and use rotational kinematics to determine position, velocity at a certain time.