Download
1 / 58
590 likes | 733 Views
Event Forewarning from Time-Series Analysis Future Soldier Conference London (14 April 2005) Lee M. Hively (presenter) Vladimir A. Protopopescu Oak Ridge National Laboratory (ORNL) * * Managed by UT-Battelle, LLC, for the USDOE under Contract No. DE-AC05-00OR22725.

E N D
Event Forewarning from Time-Series Analysis Future Soldier Conference London (14 April 2005) Lee M. Hively (presenter) Vladimir A. Protopopescu Oak Ridge National Laboratory (ORNL)* *Managed by UT-Battelle, LLC, for the USDOE under Contract No. DE-AC05-00OR22725
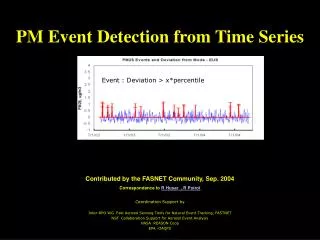
Problem: overview and aims • Key to reliability and survivability is … • Forewarning of adverse events … • Which arise from condition change … • That is hidden in noisy, complex data • Quantify change via practical technology: Fast – (near) real time Accurate – maximize total trues Portable – Ambulatory device
SOLUTION: quantify condition change Acquire Process-Indicative Data Remove Irrelevant Artifacts Capture Signature of Base Case Dynamics Capture Signature of Test Case Dissimilarity Between the Two Forewarning via Threshold Crossing
Data Quality Check • Proper number of data points? • Significant period(s) with no change? • Is sampling rate too low? • Monotonic increases or decreases? • Excessive quasi-periodicities? • Excessive noise? • Data correctly scaled? • Consistent signal amplitude?
Artifact Removal Time-serial data: xi Raw (EEG) data (3 s) Artifact (eyeblink) removal Artifact-filtered data
Phase-Space Reconstruction Construct phase space (PS): y(i) = [xi, xi+] in 2D y(i) = [xi, xi+, …, xi+(d-1)] Distribution function (DF) of PS points to capture invariant properties of the dynamics for comparison to sequel DFs
Multi-Channel Reconstruction • Data from channel A: ai • Data from channel B: bi • Data from channel C: ci • y(i) = [ai, ai+, …, ai+(d-1), bi, bi+, …, bi+(d-1), ci, ci+, …, ci+(d-1)]
Phase-Space Dissimilarity Measures • 2 = k (Pk – Qk)2/(Pk + Qk) • L = k |Pk – Qk| visitation frequency & location in PS • Dissimilarity measures: subtract, then integrate … moresensitive - Traditional measures: integrate, then subtract … less sensitive - Renormalization for consistency
Example 1: EEG data • Biomedical Monitoring Systems Inc. • Sample rate = 250 Hz • 19 channels of scalp data • Band-pass filtered: 0.5 - 99 Hz • Datasets span 5,000 – 29,500 seconds • 60 datasets: 40 event, 20 non-event • Multiple datasets: 30 from 11 patients • 36 females and 24 males: 4years57
Example 2: cardiac events • 5 electrocardiogram datasets • Digital data from Holter recordings • Analysis of one channel (250 Hz) • Datasets spanned <1 hour • Dissimilarity analysis for forewarning
Example 3: breathing difficulty • Test at Walter Reed Medical Ctr. - anesthetized pig - 0 to 1400 ml of air into pleural space - surface (chest) stethoscope - sampling rate = 10 kHz • Basecase for normal breathing (0 ml) • Testcases for 100 ml increments
Example 4: sepsis onset • 23 anesthetized rats at UTKMC - 17 exposed to inhaled endotoxin - 6 exposed to de-ionized water • 4 surface ECG electrodes (500 Hz) • Test protocol (1.5 to 3 hours total) - 30 to 60 minutes for baseline - 30 minutes of Salmonella endotoxin - 30 to 90 minutes of recovery
Example 5: fainting • Experiments at University of Ky • ECG (250 Hz ) • Flat (10m); 70° tilt (60m); flat (5m) • Two human subjects RAY/PSB (event), PSA (no event) RUI/PSB (event), PSA (no event)
Example 5: fainting results (3) • RAY event much larger slope (>12x) larger values (4x) • RUI event much larger slope (>1149x) much larger values (>34x)
Example 6: seeded motor fault Nominal = no fault 1st fault = rotor bar cut half way thru 2nd fault = same rotor bar cut 100% 3rd fault = second rotor bar cut 100% 4th fault = 2 more rotor bars cut 100% Motor power at 40kHz
Examples of Machine Failure Prognostication Data ProviderEquipment and Type of Failure Diagnostic Data 1) EPRI (S) 800-HP electric motor: air-gap offset motor power 2) EPRI (S) 800-HP electric motor: broken rotor motor power 3) EPRI (S) 500-HP electric motor: turn-to-turn short motor power 4) Otero/Spain (S) ¼-HP electric motor: imbalance acceleration 5) PSU/ARL (A) 30-HP motor: overloaded gearbox load torque 6) PSU/ARL (A) 30-HP motor: overloaded gearbox vibration power 7) PSU/ARL (A) 30-HP motor: overloaded gearbox vibration power 8) PSU/ARL (S) crack in rotating blade motor power 9) PSU/ARL (A) motor-driven bearing vibration power 10) EPRI (S) 800-HP electric motor: air-gap offset vibration power 11) EPRI (S) 800-HP electric motor: broken rotor vibration power 12) EPRI (S) 500-HP electric motor: turn-to-turn short vibration power 13) PSU/ARL (A) 30-HP motor: overloaded gearbox vibration power 14) PSU/ARL (A) 30-HP motor: overloaded gearbox vibration power 15) PSU/ARL (A) 30-HP motor: overloaded gearbox vibration power 16) PSU/ARL (A) 30-HP motor: overloaded gearbox vibration power 17) PSU/ARL (S) crack in rotating blade vibration power (S) = seeded fault (A) = accelerated failure
Technology status: Now at TRL 5 High-fidelity technology integration • Tests in simulated environment • Failure forewarning … • Via analysis of archival data … • On desktop computer … • 6 patents and two patents pending (US government retains patent rights)
Maturing from TRL5 to TRL7 • Analysis now on iPAQ3790… • With graphical user interface … • For on-line analysis of … • Real-time data … • Robust choice of parameters … • Yielding accurate predictions… • That are event- and duration-specific… • And analyst-independent TRL6 prototype
Encouraging Results … More R&D Needed • Desktop data analysis is faster than real-time • Present technology is approaching TRL6 • Good total-true forewarning rate • BUT … • Finding parameters is much slower than real-time And parameter determination is analyst-intensive • Present parameters are not sufficiently robust • Method is not specific … does not distinguish different event types
Conclusions: commercial prognostic • Data-driven, non-intrusive, fast • Provides robust, timely forewarning • Examples congruent with soldier use: - chest sounds - sepsis/ECG - epilepsy/EEG - fainting/ECG - motor failure
Conclusions: military prognostic • Data-driven, non-intrusive, fast • Provides robust, timely forewarning • Examples congruent with soldier use: - chest sounds abdominal wound - sepsis/ECG bio-warfare agent - epilepsy/EEG neurotoxin - fainting/ECG heat exhaustion - motor failure equipment failure
QUESTIONS • Contact Lee Hively (hivelylm@ornl.gov) Office: 865-574-7188 Fax: 865-576-5943 • http://computing.ornl.gov/cse_home/staff/hively.shtml
FORWARD LOOKING INITIATIVES • Scalp EEG for … - CNS pathologies, drug/chemical effects, head trauma, shock - evoked response for CNS/sensory diagnostic - alertness/fatigue/stress/performance - hands-free computer control (removal of muscular artifacts) • EKG for forewarning of cardiac fibrillation • Lung sounds for pulmonary pathology • Other physiological data (body sounds, EMG, etc.) • Data fusion (EEG/EKG/body sounds ...) for physiological pathologies • Muscle tremors (3-axis acceleration) for neuromuscular pathologies • Condition monitoring of machines for failure forewarning • Fetal monitor during labor and delivery • Monitor for SIDS-risk patients
Dynamical Reconstruction • Data at discrete times: xi = x(ti) • d-dimensional phase space (PS): y(i) = [xi, xi+, …, xi+(d-1)] • PS bins: occurrence frequency (Un)changing DF with (un)altered dynamics • Nonlinear measures from PS-DF
Phase-Phase Distribution Function • Symbolize: xi= S(xi–xmin)/(xmax-xmin) • PS vector as base-S identifier y(i) z(i) = k si+(k-1) Sk-1 Y(i) Z(i) = z(i) + Sd z(i+) • Tabulate occurrence in each PS bin • Pk = baseline distribution (DF) • Qk = DF of testcase
Solution: Time-Serial Data Analysis • Conventional statistical measures • Traditional nonlinear measures Correlation dimension (complexity) Kolmogorov entropy (predictability) Mutual information (de-correlation) • ORNL’s patented measures Discrete statistical distributions Measures of dissimilarity
Conventional StatisticalMeasures • Average: x = (1/N) i xi • Standard deviation: 2 = i (xi – x)2/N • Skewness: g1 = i (xi – x)3/N3 • Kurtosis: g2 = i (xi – x)4/N4 - 3
Further Details • Divide data: non-overlapping subsets • Check quality of data of each subset • Remove artifact(s) from signal • Create statistical distribution function • V and V from baseline dissimilarity • Dissimilarity between baseline & unkn. • Renormalization: v = (V – V)/V
Artifact removal • Window of 2w+1 points of raw data (ei) • Least squares fit of parabola to ei • Central point as estimate of artifact (fi) • Artifact-filtered data: gi = ei – fi • Move window by one point and repeat
Example of Artifact Removal Raw data minus Artifact equals Artifactfiltered data Note vertical scale change
Seeded Fault in Three-Phase Electric Motor Manufacturer: Allis Chalmers Bearing type: sleeve Rated voltage: 4160 Nameplate current: 100 a Rated HP: 800 Number of rotor bars: 94 Winding type: form wound Number of stator slots: 40 Phases: 3 Hertz: 60 RPM: 710 Motor type: induction Insulation class: F Poles: 10 Enclosure: TEFC Bar configuration: copper Nominal = no fault First fault = rotor bar cut half way through Second fault = same rotor bar cut 100% through Third fault = second rotor bar cut 100% through Fourth fault = two more rotor bars cut 100% through Motor power at 40kHz
Convergence of Technologies for Spiral Integration • GPS for accurate location of data source FCC mandate: GPS mobile phone location to 911 • PDA/DSP for smart data acquisition and processing … commercial toolkit to program PDA • Mobile phone to transmit data Above 3 in “Digital Angel,” (NYTimes,2/22/01,DJ Wallace) Wireless communications for extreme envir (ORNL 2003) • Power from biofuel cell (Science, 17 May 2002, p1222) Thin-film rechargeable lithium battery (ORNL 2003) • Microcantilever-based sensors (ORNL 2003) Lab-on-a-chip (ORNL 2003)
Convergence of Technologies: Smart Sensors • GPS for accurate location of data source FCC mandate: GPS mobile phone location to 911 • PDA/DSP for smart data acquisition and processing … MATLAB toolkit to program DSP in ANSI C • Mobile phone to transmit data Above 3 in “Digital Angel,” (NYTimes,2/22/01,DJ Wallace) Wireless communications for extreme envir (ORNL 2003) • Power from biofuel cell (Science, 17 May 2002, p1222) Thin-film rechargeable lithium battery (ORNL 2003) • Microcantilever-based biosensors (ORNL 2003) Lab-on-a-chip (ORNL 2003)
MANY OTHER POTENTIAL APPLICATIONS • Scalp EEG for … - CNS pathologies, drug/chemical effects, head trauma, shock - evoked response for CNS/sensory diagnostic - alertness/fatigue/stress/performance - hands-free computer control (removal of muscular artifacts) • EKG for forewarning of cardiac fibrillation • Lung sounds for pulmonary pathology • Other physiological data (body sounds, EMG, etc.) • Data fusion (EEG/EKG/body sounds ...) for physiological pathologies • Muscle tremors (3-axis acceleration) for neuromuscular pathologies • Condition monitoring of machines for failure forewarning • Fetal monitor during labor and delivery • Monitor for SIDS-risk patients
Vision for Advanced Biomedical Analysis • New sensors will provide … • Wealth of data sounds, EEG, ECG, blood, images, etc. for … Fusion of multi-channel data from … • Dynamics ofmetabolic/sensory networks with … • Near-real-time response, yielding … • New medical science and … • Lower cost, higher quality care of patients
Correlation Dimension d = dimensionality R = radius about central point = |xi – x0| n = number of points within radius Rd ij = max |xi+k – xj+k| over 0km-1 m = average number of points per cycle n = scale length associated w/noise M = # randomly sampled pt pairs D = {(-1/M)ij ln[(ij - n)/( - n)]}-1
Kolmogorov Entropy K = -fs ln(1 – 1/b) = bits lost per sec fs = digital sampling rate b = (1/M) ik bik bik= number of timesteps for two nearby points to diverge from |xi – xk| to |xi – xk| > = scale length in data (multiple of a) a = (1/N) i |xi – x| and x = (1/N) i xi
Mutual Information Function I(R,S) = predictable bits in S from R = I(S,R) = H(R) + H(S) – H(R,S) H(R) = - i P(ri) log2[P(ri)] H(R,S)= - ik P(ri,sk) log2[P(ri,sk)] R, S = all possible values of ri and sk P(ri) = probability associated with ri P(ri,sk)= joint probability of ri and sk Typically use first minimum (M1) in I
Choice of PS Parameters Algorithm stepParameters for this stepAllowed rangeTypical valuesChoice Acquire analog data # data channels (C) 1 c 32 1 1 Digitize data data points per cutset (N) variable 1 N/104 7 N = 25,000 data sampling rate (fs) fs, fs/2, fs/3, … fs fs digital precision in bits (B) fixed fixed by acquisition fixed anti-aliasing filter param. fixed fixed by acquisition fixed Remove artifact filter half width (w) 1 < w < (N-1)/2 w = fs/(4.4 fpeak) w = fs/(4.4 fpeak) raw (R) artifact (A) R, A, or AF variable A artifact-filtered (AF) Symbolize data number of symbols (S) 2 S 2B variable operational uniform; equiprobable U or E equiprobable equiprobable Construct PS # PS dimensions (d) 2 d 26 variable operational phase-space lag () 1 fs/fpeak = M1/(d-1) = M1/(d-1) Connected PS inter-symbol lag () 1 fs/fpeak = 1 = 1