Download
1 / 9
90 likes | 206 Views
Development of a Baseline Tropical Cyclone Model Using the Alopex Algorithm. Robert DeMaria. Forecast “Skill”. Skill is measured by comparison to simple benchmark “no-skill” models Benchmark forecast based on basic storm information

E N D
Development of a Baseline Tropical Cyclone Model Using the Alopex Algorithm Robert DeMaria
Forecast “Skill” • Skill is measured by comparison to simple benchmark “no-skill” models • Benchmark forecast based on basic storm information • Storm initial position and intensity, previous 12 hour change, and current date • Track and intensity benchmarks developed in 1972 and 1988 • NHC wind radii benchmark model developed at CSU in 2004, but used very simple minimization algorithm • Can benchmark wind radii model be improved using ALOPEX algorithm for minimization?
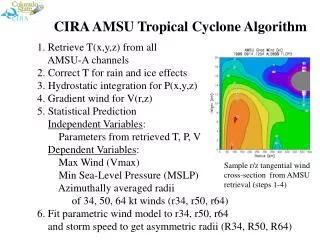
Benchmark Model and Error Function • Benchmark model is a set of parametric equations with a total of 20 free parameters in matrix D • Given azimuth, returns radius of maximum wind • Error function created for optimization of D • E = [(R34-r34)2+(R50-r50)2+(R64-r64)2] + Penalty term • R34,50,64 = observed radii • r34,50, 64 = computed radii • Summation is over ~3000 data point from 1988-2004 • Penalty term becomes large when values of D are non-physical
Previous Minimization Algorithm • Very simple local search • Guaranteed to get stuck in first minima found • Starting point at best guess
Alopex Algorithm • Designed for minimizing error in problems with large number of variables • Does not get stuck in local minima • Very general
Alopex Fundamentals • Iterative • Variables incremented in biased random directions • Correlation computed every iteration for every member of D • correlationi = ΔDi * ΔE • If error after previous iteration reduced, probability of incrementing in same direction is high • If error of previous iteration increased, probability of incrementing in same direction is low • Temperature used to prevent getting stuck in local minima • After N iterations, T set to average correlation of all variables over N iterations
My Implementation • Written in Fortran • Values for N, initial D vals, increment, and penalty term found empirically • Prevents increments that will produce non-physical results
Results • Run for 5 million iterations • Iteration # 329068 found smallest error of ~ 45 nmi • Original algorithm found very similar D matrix with error of ~38 nmi
Future Work • Remove purely physical increment limitation • Run with more iterations • Run with different starting location • Fine tune using result as starting location smaller increment