Download
1 / 10
110 likes | 341 Views
b. a. La operación “virtual” de girar a hacia b , la denotaremos por . Donde es el vector unitario en la dirección del vector azul. El tornillo y el producto cruz. Si el vector a lo giramos hacia b , entonces obtenemos el movimiento indicado con la flecha azul. q.

E N D
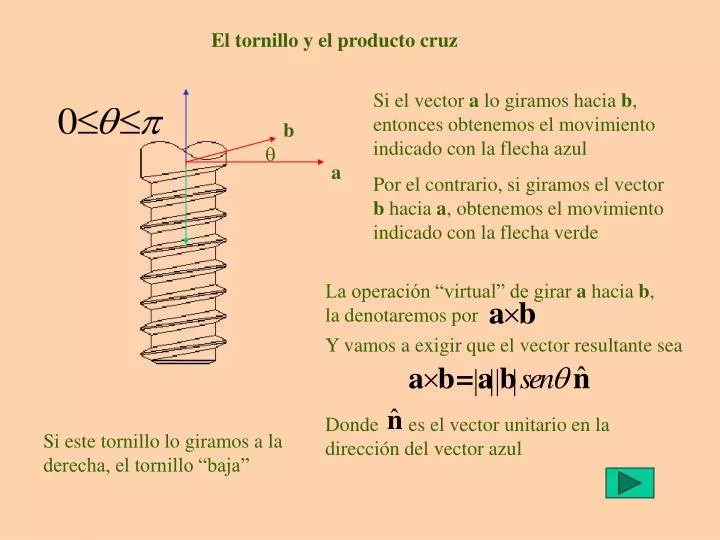
b a La operación “virtual” de girar a hacia b, la denotaremos por Donde es el vector unitario en la dirección del vector azul El tornillo y el producto cruz Si el vector a lo giramos hacia b, entonces obtenemos el movimiento indicado con la flecha azul q Por el contrario, si giramos el vector b hacia a, obtenemos el movimiento indicado con la flecha verde Y vamos a exigir que el vector resultante sea Si este tornillo lo giramos a la derecha, el tornillo “baja”
Si definimos entonces b q Donde esta vez es el vector unitario obtenido en la dirección del vector verde. a De tal forma que este producto no es conmutativo, y además
El producto cruz corresponde a un vector normal al paralelogramo formado por a y b y de magnitud igual al área de dicho paralelogramo Una interpretación geométrica del producto cruz C B El área del paralelogramo es b q A a O B C q O A
F q r O l Puesto que , la magnitud del torque es consistente. Y además la dirección del torque está en una línea perpendicular a r y F, y esta dirección es precisamente la dirección de orientación positiva (según la regla del famoso tornillo) Una interpretación física del producto cruz: torque o momento Si F es una fuerza y r es el vector desde un punto fijo a cualquier punto sobre F, entonces puede ser interpretado como el torque, o momento, de la fuerza F alrededor del punto O
En un sistema de orientación positiva, trivialmente se cumple lo siguiente Y por lo demás, si dos vectores son paralelos entonces su producto cruz es el vector nulo. Y es claro que ¡cuidado, es el vector nulo, no el cero real!
Representación en componentes del vector El vector es perpendicular a ambos vectores, entonces Sean a y b dos vectores no paralelos, con representación en componentes Nuestro objetivo será encontrar los valores de p1, p2 y p3 tales que ¡Este sistema, por sí solo, tiene muchísimas soluciones!
Siendo, ahora, la constante l a descubrir. Necesitamos imponer la condición de la magnitud del vector producto cruz. Es decir debemos obtener información de Las infinitas soluciones del sistema anterior están dadas por Estas soluciones las podemos escribir de forma simétrica como
Esta última ecuación traducida a sus componentes, nos queda Pero de la ecuación anterior podemos obtener
Desarrollando con paciencia estas expresiones podemos comprobar que son iguales. De modo que obtenemos la ecuación Se puede verificar que para l = 1 corresponde a un sistema orientación positiva, y para l = - 1 corresponde a un sistema orientado negativamente (recuerde el tornillo). Para l = 1 obtenemos
Con estas ecuaciones calculamos los valores de p1, p2 y p3 Una regla nemotécnica (es decir algo solo para recordar pero que no tiene ningún valor matemático) es como sigue