Download
1 / 18
180 likes | 390 Views
Workshop on Uncertain Dynamical Systems. Robust Semidefinite Programming and Its Application to Sampled-Data Control. Yasuaki Oishi (Nanzan University) Udine, Italy August 26, 2011. * Joint work with Teodoro Alamo. 1. Introduction. Robust semidefinite programming problems.

E N D
Workshop on Uncertain Dynamical Systems Robust Semidefinite Programming andIts Application to Sampled-Data Control Yasuaki Oishi (Nanzan University) Udine, Italy August 26, 2011 *Joint work with Teodoro Alamo
1. Introduction Robust semidefinite programming problems • Optimization problems constrained by uncertain • linear matrix inequalities • Many applications in robust control Robust SDP problem • Affine parameter dependence • Polynomial or rational par. dep.
This talk: general nonlinear parameter dependence • How to obtain the sufficient condition? • How to make the condition less conservative? Key idea: DC-representations “difference of two convex functions” [Tuan--Apkarian--Hosoe--Tuy 00] [Bravo--Alamo--Fiacchini--Camacho 07]
2. Preparations Problem nonlinear fn. • Assumption
DC-representation convex convex Example
Example cf. [Adjiman--Floudas 96] • Mild enough to assume
3. Proposed approach • Assumption: DC-representation is available convex convex • Key step: obtaining bounds concave convex
Obtaining bounds :concave :convex
concave convex
Approximate problem • Approximate solution • Number of LMIs cf. NP-hardness • Conservative
Reduction of conservatism • Adaptive division
Quality of the approximation • depends on the choice • Measure of conservatism
Measure of conservatism Theorem
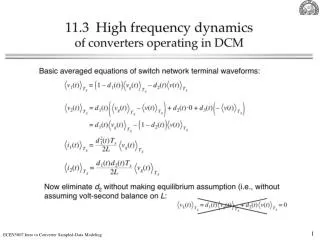
4. Application to sampled-data control sampler hold discrete discrete • Analysis and design of such sampled-data systems [Fridman et al. 04][Hetel et al. 06][Mirkin 07][Naghshtabrizi et al. 08] [Suh 08][Fujioka 09][Skaf--Boyd 09][O.--Fujioka 10][Seuret 11]...
[O.--Fujioka 10] sampler hold discrete discrete • Formulation into a robust SDP • Avoiding a numerical problem for a small sampling interval [O.--Fujioka 10]
6. Summary Robust SDP problems with nonlinear param. dep. • Conservative approach using DC-representations • Concave and convex bounds • Approximate problem • Reduction of conservatism • Optimization of the bounds w.r.t. some measure • Application to sampled-data control • Combination with the polynomial-based methods [Chesi--Hung 08][Peaucelle--Sato 09][O. 09]