Download
1 / 26
380 likes | 986 Views
Dynamic Matrix Control - Introduction. Developed at Shell in the mid 1970’s Evolved from representing process dynamics with a set of numerical coefficients Uses a least square formulation to minimize the integral of the error/time curve. Dynamic Matrix Control - Introduction.

E N D
Dynamic Matrix Control - Introduction • Developed at Shell in the mid 1970’s • Evolved from representing process dynamics with a set of numerical coefficients • Uses a least square formulation to minimize the integral of the error/time curve Industrial Process Control
Dynamic Matrix Control - Introduction • DMC algorithm incorporates feedforward and multivariable control • Incorporation of the process dynamics makes it possible to consider deadtime and unusual dynamic behavior • Using the least square formulation made it possible to solve complex multivariable control calculations quickly Industrial Process Control
Dynamic Matrix Control - Introduction • Consider the following furnace example (Cutlet & Ramaker) • MV • Fuel flow FIC • DV • Inlet temperatureTI • CV • Outlet temperature TIC Industrial Process Control
Dynamic Matrix Control - Introduction • The furnace DMC model is defined by its dynamic coefficients • Response to step change in fuel, a • Response to step change in inlet temperature, b Industrial Process Control
Dynamic Matrix Control - Introduction • DMC Dynamic coefficents • Response to step change in fuel, a • Response to step change in inlet temperature, b Industrial Process Control
Dynamic Matrix Control - Introduction • The DMC prediction may be calculated from those coefficients and the independent variable changes Industrial Process Control
Dynamic Matrix Control - Introduction • Feedforward prediction is enabled by moving the DV to the left hand side Industrial Process Control
Dynamic Matrix Control - Introduction • Predicted response determined from current outlet temperature and predicted changes and past history of the MVs and DVs • Desired response is determined by subtracting the predicted response from the setpoint • Solve for future MVs -- Overdetermined system • Least square criteria (L2 norm) • Very large changes in MVs not physically realizable • Solved by introduction of move suppression Industrial Process Control
Dynamic Matrix Control - Introduction • Controller definition • Prediction horizon = 30 time steps • Control horizon = 10 time steps • Initialization • Set CV prediction vector to current outlet temperature • Calculate error vector Industrial Process Control
Dynamic Matrix Control - Introduction • Least squares formulation including move suppression Move suppression Industrial Process Control
Dynamic Matrix Control - Introduction • DMC Controller cycle • Calculate moves using least square solution • Use predicted fuel moves to calculate changes to outlet temperature and update predictions • Shift prediction forward one unit in time • Compare current predicted with actual and adjust all 30 predictions (accounts for unmeasured disturbances) • Calculate feedforward effect using inlet temperature • Solve for another 10 moves and add to previously calculated moves Industrial Process Control
Dynamic Matrix Control - Introduction • Furnace Example • Temperature Disturbance DT=15 at t=0 • Three Fuel Moves Calculated Industrial Process Control
Dynamic Matrix Control Basic Features Since 1983 • Constrain max MV movements during each time interval • Constrain min/max MV values at all times • Constrain min/max CV values at all times • Drive to economic optimum • Allow for feedforward disturbances Industrial Process Control
Dynamic Matrix Control Basic Features Since 1983 • Restrict computed MV move sizes (move suppression) • Relative weighting of MV moves • Relative weighting of CV errors (equal concern errors) • Minimize control effort Industrial Process Control
pcr: k > M M = number of time intervals required for CV to reach steady-state j = index on time starting at the initial time d = unmeasured disturbance Dynamic Matrix Control Basic Features Since 1983 • For linear differential equations the process output can be given by the convolution theorem Industrial Process Control
pcr: Where, N = number of future moves M = time horizon required to reach steady state Note: the estimated outputs depend only on the N computed future inputs Dynamic Matrix Control Basic Features Since 1983 • Breaking up the summation terms into past and future contributions Industrial Process Control
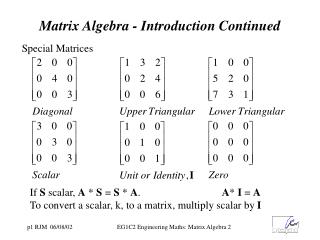
Dynamic Matrix Control Basic Features Since 1983 • Let N=number future moves, M=time horizon to reach steady state, then in matrix form Industrial Process Control
Dynamic Matrix Control Basic Features Since 1983 • Setting the predicted CV value to its setpoint and subtracting the past contributions, the “simple” DMC equation results pcr: Dynamic matrix A is size MxN where M is the number of points required to reach steady-state and N is the number of future moves Industrial Process Control
Dynamic Matrix Control Basic Features Since 1983 • To scale the residuals, a weighted least squares problem is posed pcr: wi = relative weighting of the ith CV which will be repeated M times to form the diagonal weighting matrix W • For example, the relative weights with two CVs Industrial Process Control
Dynamic Matrix Control Basic Features Since 1983 • To restrict the size of calculated moves a relative weight for each of the MVs is imposed Industrial Process Control
Dynamic Matrix Control Basic Features Since 1983 • Subject to linear constraints • The change in each MV is within a “step” bound Industrial Process Control
Dynamic Matrix Control Basic Features Since 1983 • Subject to linear constraints • Size of each MV step for each time interval Industrial Process Control
Dynamic Matrix Control Basic Features Since 1983 • Subject to linear constraints • MV calculated for each time interval is between high and low limits Industrial Process Control
Dynamic Matrix Control Basic Features Since 1983 • Subject to linear constraints • CV calculated for each time interval is between high and low limits Industrial Process Control
Dynamic Matrix Control Basic Features Since 1983 • The following LP subproblem is solved • where the economic weights are know a priori Minimize Subject to: Industrial Process Control
Dynamic Matrix Control Basic Features Since 1983 • The original dynamic matrix is modified • Aij is the dynamic matrix of the ith CV with respect to the jth MV, Industrial Process Control