Download
1 / 16
180 likes | 303 Views
B. Wayne Bequette. Closed-loop Regulation of Blood Glucose based on Subcutaneous Measurements. Background Model Predictive Control (MPC), State Estimation Model and Controller Design Unique Challenges of Diabetes Simulation Results Focus on Meal Disturbance Rejection

E N D
B. Wayne Bequette Closed-loop Regulation of Blood Glucose based on Subcutaneous Measurements • Background • Model Predictive Control (MPC), State Estimation • Model and Controller Design • Unique Challenges of Diabetes • Simulation Results • Focus on Meal Disturbance Rejection • Sensor Degradation and Compensation
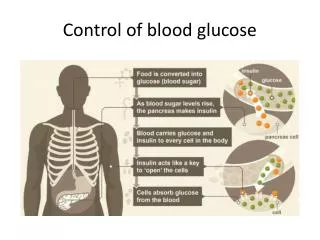
Automated Feedback Control glucose setpoint patient controller pump Sensor (Therasense)
Model Predictive Control Find current and future insulin infusion rates that best meet a desired future glucose trajectory. Implement first “move.” Correct for model mismatch (estimate states), then perform new optimization.
MPC Issues • Type of Model • Linear differential equations • Model Update • Additive “correction”? • Explicit disturbance (meal) or parameter estimation? • Error Due to Disturbance or Noise? • Future Prediction? • Classical MPC - assume constant for future • Sensors & Estimation • Measure subcutaneous, control blood glucose
MPC Literature Review • Dogs, Venous Blood, Glucose+Insulin Delivery • Kan et al. (2000) • Simulation, s.c. Sensor + Delivery, ANN • Trajanoski and Wach (1998) • Simulation, i.v.-i.v., EFK-based MPC • Parker et al. (1999) • Simulation, i.v.-s.c., EKF-based MPC • Lynch and Bequette (2002) • Simulation, s.c.-s.c., EKF-based MPC • Lynch (2002)
Optimal Estimation - Kalman Filter • Measurement noise vs. process noise (disturbances) • If little measurement noise • Trust measurement more than model • If much measurement noise • Trust model more than measurement • Estimate unmeasured states • Blood glucose based on s.c. measurement, for example
Simulation Study • Simulated Type I Diabetic • Minimal Model - Bergman (3-state) • Lehman and Deutsch (1992) Meal Model Absorption into circulation Gastric emptying
Constant Disturbance Assumption (Classical) Additive step output Glucose conc. Additive step input Insulin infusion
Simulation Study Using s.c. Sensor • Simulated Type I Diabetic • 19 Differential Equations (Sorenson, 1985) - Extended • Model for Estimator/Controller • Modified Bergman “minimal model” • Parameters fit to Sorenson response • Augmented equation for meal disturbance
Simulation Results - s.c. Sensor Degradation Motivates use of additional blood capillary measurement for s.c. sensor calibration 50% sensor sensitivity decrease over 3 days
Simulation results: Sensor compensation 5% s.c. noise (s.d. = 3.8 mg/dl) 2% capillary blood noise (s.d. =1.6 mg/dl) Sensor degradation (50% over 3 days) Sensitivity estimate
Summary • Kalman Filter (estimation)-based MPC • Disturbance (meal) estimation • Improved disturbance prediction • Low-order linear model, high-order patient • State estimation: measure s.c., estimate blood glucose • Estimate sensor sensitivity with capillary blood measurement • Dual rate Kalman Filter • Future • Multiple Models
Acknowledgment • Sandra Lynch • MS Thesis, RPI (2002)
Kalman Filter w/Augmented States Augmented state (includes meal disturbance) Predictor-corrector equations: Insulin infusion Aug. state estimate Kalman gain Measured s.c. glucose