Download
1 / 1
10 likes | 178 Views
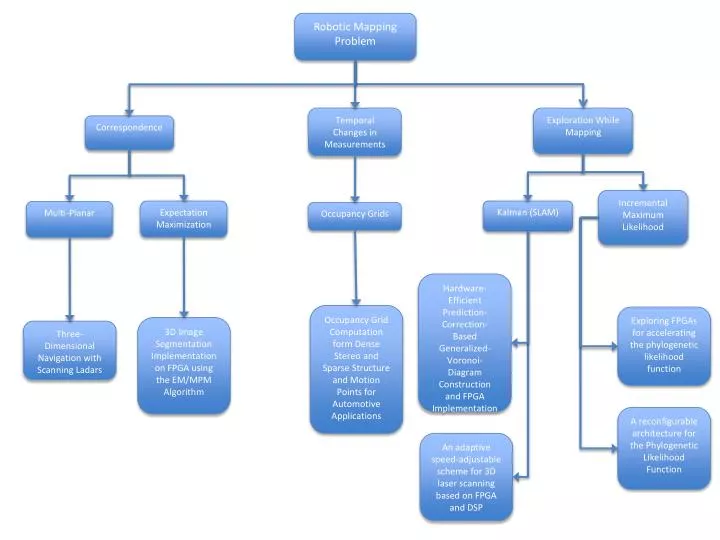
Robotic Mapping Problem. Temporal Changes in Measurements. Exploration While Mapping. Correspondence. Incremental Maximum Likelihood. Expectation Maximization. Kalman (SLAM). Multi-Planar. Occupancy Grids.

E N D
Robotic Mapping Problem Temporal Changes in Measurements Exploration While Mapping Correspondence Incremental Maximum Likelihood Expectation Maximization Kalman (SLAM) Multi-Planar Occupancy Grids Hardware-Efficient Prediction-Correction-Based Generalized-Voronoi-Diagram Construction and FPGA Implementation Occupancy Grid Computation form Dense Stereo and Sparse Structure and Motion Points for Automotive Applications Exploring FPGAs for accelerating the phylogenetic likelihood function 3D Image Segmentation Implementation on FPGA using the EM/MPM Algorithm Three-Dimensional Navigation with Scanning Ladars A reconfigurable architecture for the Phylogenetic Likelihood Function An adaptive speed-adjustable scheme for 3D laser scanning based on FPGA and DSP