Download
1 / 21
210 likes | 223 Views
This paper discusses the implementation of an energy harvesting system for powering thermal gliders used in long duration ocean research. The system utilizes phase change material to drive oil for buoyancy control, resulting in extended endurance and increased data collection capabilities.

E N D
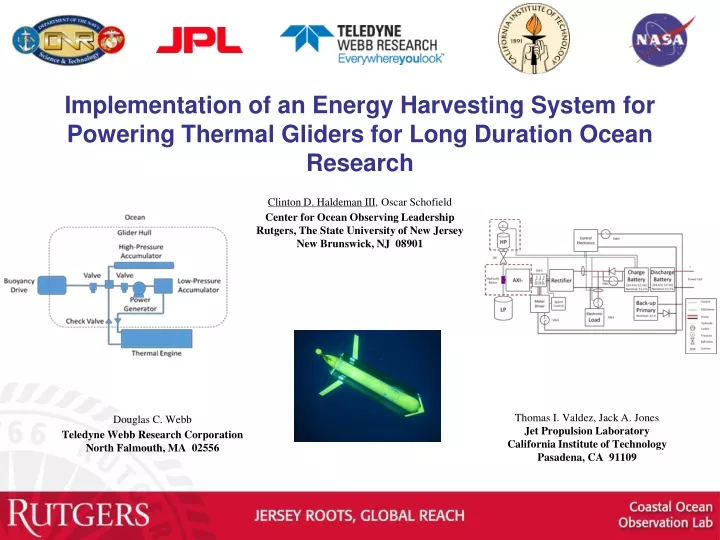
Implementation of an Energy Harvesting System for Powering Thermal Gliders for Long Duration Ocean Research Clinton D. Haldeman III, Oscar Schofield Center for Ocean Observing Leadership Rutgers, The State University of New Jersey New Brunswick, NJ 08901 Thomas I. Valdez, Jack A. Jones Jet Propulsion Laboratory California Institute of Technology Pasadena, CA 91109 Douglas C. Webb Teledyne Webb Research Corporation North Falmouth, MA 02556
I. Background – Slocum Thermal glider to Slocum-TREC • Building on success of previous ONR funded project that resulted in 2 thermally propelled gliders • Joint project; NASA’s JPL & TWRC integrate SOLO-TREC (Sounding Oceanographic Lagrangrian Observer, 2009) and Slocum glider. Rutgers – year 2, operational expertise. • Testing – 15 miles offshore (trim, ballast, etc.) • Thomas I. Valdez – Power Subsystem Analyst • ROCKET SCIENCE!!!
APEX Floats – 4 year life Spray Glider - ~6 months duration Seaglider – up to 10 months duration Autonomous Platforms – buoyancy driven Slocum electric glider – ~1 year w/ extended energy bay
Slocum Thermal glider Slocum electric glider – single engine; stepping stone to the thermal Projected endurance – 4 years or more Uses Phase Change Material (PCM) to drive oil used for buoyancy control. Duration is limited to ability of primary battery to power “hotel load”
II. Slocum-TREC – design difference Solo-TREC Slocum-TREC 2 thermal engines, so more oil available. PCM uses aluminum metal foam to enhance thermal conductivity - thermal response by factor of 50.
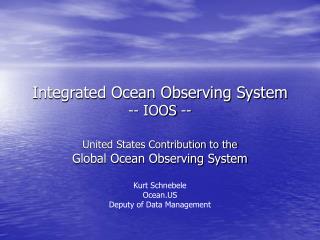
P Slocum-TREC Energy Storage Functional System Schematic Control Electronics HP SW0 BV + SW3 Discharge Battery (14.4 to 12.5V) Nominal: 13.2 V Charge Battery (14.4 to 12.5V) Nominal: 13.2 V AXI- Rectifier Hydraulic Motor Power Out SW2 - Motor Driver LP Back-up Primary Nominal: 12 V Speed Control Control DAQ Sense Electronic Load Power SW1 SW4 Hydraulic Switch Pressure Ball Valve 2 battery packs; 1 being charged, 1 being discharged (used) Current 7
Electronics Delivery: Electronics Integration Control Electronics Batteries Slocum Controller (TWR) Energy Storage System Control Electronics (JPL)
Energy Harvesting Specifics • Typical generation cycle – 40-45 seconds • Generates 1.8 Wh/Dive, stores 1.7 Wh/Dive; delivers 70 Wh every 80 generation cycles • Battery voltage – 13.2-13.4 V, an optimal operating range for a variety of scientific sensors • Energy can be delivered at power levels as high as 800 W, opening the door to a wide array of other sensors where power levels are a concern • Voltage levels correspond to 40-75% state-of-charge (SOC) - optimized to maximize battery cycle life, allowing 10+ years of operation! 90 generation cycles * ~4 hours/dive = ~15 days, Voltages steady
III. Testing – Tropical Waters • Goals – Endurance Tests • A) Hawaii • 2 Slocum-TREC gliders deployed (Lewis and Clark) • Lewis never resurfaced (possible large animal interaction?) • Clark – suffered issue w/ trim mechanism; recovered after 45 days • ½ of planned initial endurance test • B) St. Thomas, USVI • Clark repaired; redeployed Jan 2015 • Oil volume issue; necessitated recovery • Recovered after 27 days; adjustments made • Redeployed for another 68 days; accumulator leak • Total of 95 days; but non-consecutive
Results – What did we learn? • A) Energy harvesting/generation/storage system worked incredibly well. Shunting energy, so increased CTD resolution while remnants of Hurricane Danny and then Tropical Storm Erika passed by. Energy budget issue is solved; perhaps bringing biofouling to the forefront • B) Differing ballast & flight mechanics/nuances, such as twist • C) Latitudinal range of operation – still TBD. Or, how much energy can we generate? Electric pump? • D) Environmental interaction – how to pilot this glider. Buoyancy drive vs. power generation, etc. • E) Water Mass Layering / CTD issues
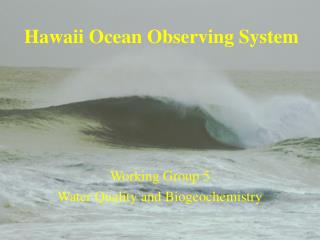
Area of Rapid Intensification (RI) Increase of sustained winds of at least 30 kts in a 24 hour period
What We Know… • High intensity storms destructive; loss of life and property, cause economic damage… • …National Centers for Environmental Prediction (NCEP) mission statement includes delivering climate products protecting life, property, and economic well-being. • Real-Time Ocean Forecasting System (RTOFS) to input into hurricane and climate forecast systems • It’s a data issue…or the lack thereof • Working on pushing all Rutgers glider data to Global Telecommunications System (GTS) for model ingestion • Provide continual high resolution data needed for assimilation to correct errors in model What Can We Do?
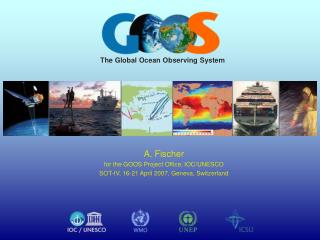
Subtropical underwater (SUW) significantly deeper than shown in RTOFS
What Can We Do? • Working on pushing all Rutgers glider data to Global Telecommunications System (GTS) for model ingestion • Continual high resolution data needed for assimilation, else errors in model occur • Lagrangian drifters, but only yield a profile every 10 days • Buoys, but don’t provide profiles What Have We Done?
When zoomed in to surface of temperature profiles, cooling visible as storm passes
Strengths of Slocum-TREC become apparent • Continual data collection, with a cost that diminishes over lifetime of glider; Iridium satellite communications become primary expense • Providing high resolution data in sparsely sampled areas can correct errors in models, leading to better track and intensity forecasts. Examples include Hurricane Irene in NJ, where glider data resulted in a reduced intensity forecast due to bottom boundary layer mixing and surface layer cooling
Summary • Slocum-TREC – “next generation” of ocean gliders • Harvesting thermal energy from the ocean has solved the issue of a limited power budget – now on to the next • A few minor mechanical issues need addressed, but piloting will still contain a learning curve. Nuances particular to the thermal design and latitudinal limits may pose challenges • Providing continual data over an extremely long duration can increase the accuracy of models, ultimately resulting in the preservation of life and property. • As Henry Stommel suggests, we need a fleet of “about 1,000.”