Download
1 / 43
430 likes | 687 Views
Automação. Máquinas a vapor há 2 séculos; Controlo manual; Automação = Controlo autónomo dos processos através de computadores ou autómatos programáveis; Intervenção humana. Exemplo de um processo Fabricação de café. Exemplo de um processo automatizado Portas “mágicas” de um templo.

E N D
Automação • Máquinas a vapor há 2 séculos; • Controlo manual; • Automação = Controlo autónomo dos processos através de computadores ou autómatos programáveis; • Intervenção humana.
Exemplo de um processo automatizadoPortas “mágicas” de um templo Portas Fogueira Altar Depósito de ar selado Depósito de água selado Balde Contrapesos
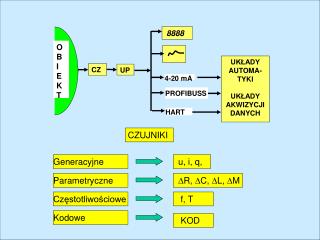
Distribuição Máquinas Accionadores Tratamento de dados Aquisição de dados Diálogo homem-máquina Comando de potência Componentes de um sistema automatizado Rede eléctrica, pneumática, hidráulica, etc. Processos tecnológicos Motores eléctricos, cilindros, etc. Sensores de temperatura, pressão, proximidade, etc. Contactores, variadores de velocidade, etc. Computadores e autómatos programáveis Interruptores, teclados, etc.
Níveis de um sistema automatizado • Nível 1 – Máquinas e dispositivos de comando; • Nível 2 – Controlo dos dispositivos (computadores e autómatos programáveis); • Nível 3 – Gestão da produção (recolha e tratamento de dados); • Nível 4 – Gestão global (produção, armazéns, distribuição, etc.).
Grupos de automação • Dispositivos de comando e potência; • Contactores e disjuntores; • Relés; • Temporizadores; • Arrancadores; • Variadores de velocidade; • Programadores electrónicos. • Actuadores; • Eléctricos; • Pneumáticos; • Hidráulicos.
Grupos de automação • Sistemas de tratamento de dados; • Autómatos programáveis; • Redes de comunicação. • Interfaces homem-máquina; • Unidades de comando e de sinalização; • Botoneiras; • Teclados e terminais. • Dispositivos de aquisição de dados; • Processos contínuos: Sensores de fluxo, temperatura, pressão, velocidade, aceleração; • Processos discretos: Nível, composição, peso, volume, tensão, compressão, posição, presença, visão.
Grupos de automação Interruptor Luz Temperatura Caudal Pressão Teclado Inputs Outputs Motor Servo-motor Solenóide Embraiagem Relé Visor Impressora Controlador Interface Operador-controlador
Interruptor Lâmpada Tensão (220 V; 24 V) Exemplo de um circuito eléctricocom lâmpada
Interruptor Lâmpada Tensão (220 V; 24 V) Exemplo de um circuito eléctricocom lâmpada
Interruptor Resistência Tensão (220 V; 24 V) Exemplo de um circuito eléctricocom resistência
Interruptor Resistência Tensão (220 V; 24 V) Exemplo de um circuito eléctricocom resistência
Interruptor Bobina Tensão (220 V; 24 V) Exemplo de um circuito eléctricocom bobina
Interruptor Bobina Tensão (220 V; 24 V) Exemplo de um circuito eléctricocom bobina
Interruptor Bobina Tensão (220 V; 24 V) Exemplo de um circuito eléctricocom bobina O interruptor pode ser comandado mecanicamente por um termostato, pressostato, temporizador, etc.
Botão START Botão STOP Núcleo Electroíman Bobina Tensão (24 V; 12 V) Exemplo de um encravamento
Botão START Botão STOP Núcleo Electroíman Bobina Tensão (24 V; 12 V) Exemplo de um encravamento
Botão START Botão STOP Núcleo Electroíman Bobina Tensão (24 V; 12 V) Exemplo de um encravamento
Botão START Botão STOP Núcleo Electroíman Bobina Tensão (24 V; 12 V) Exemplo de um encravamento
Botão START Botão STOP Núcleo Electroíman Bobina Tensão (24 V; 12 V) Exemplo de um encravamento
(T) Térmicos – protecção contra sobrecargas; (F) Fusíveis (ou disjuntor) – protecção contra sobreintensidades T F M3 ~ Exemplo de comando e protecção de um motor eléctrico
M 3 ~ Exemplo de comando e protecção de um motor eléctrico
M 3 ~ Exemplo de comando e protecção de um motor eléctrico
M 3 ~ Exemplo de comando e protecção de um motor eléctrico
Piezo-resistências comprimida traccionada Ponte de Wheatstone comprimida traccionada Sinal Medição de peso
Termopar Ponte de Wheatstone Sinal Medição de temperatura
Termostato tº Bobina Tensão (220 V; 24 V) Detecção de temperatura
Pressostato Bobina Tensão (220 V; 24 V) Detecção de pressão
E R E R Detecção de proximidade • Detectores de fim de curso; • Detectores ópticos: • Interrupção do feixe; • Reflexão do feixe. • Detectores indutivos; • Detectores ultrasónicos.
Esquema do processo Válvula Cinta de entrada Cinta de saída Balança Diagrama de blocos + Válvula de controlo Processo de enchimento Input: Peso pretendido Contentor cheio - Sensor de peso Retroacção ou feed-back
Input– output requerido Output + Actuador (controlador) Processo - Sensor Retroacção ou feed-back
Actuadores • Válvulas de solenóide; • Relés; • Cilindros; • Motores eléctricos: • Servomotores de c.c. (controlo preciso de posição, velocidades variáveis elevadas e grandes binários); • Motores síncronos de c.a. (mono, bi ou trifásico)(velocidade constante e função da frequência, + pequeno, + leve que um motor equivalente de c.c.); • Motores de c.c.; • Motores passo a passo (tensão variável, binário e velocidade inversamente proporcionais, controlo preciso de posição);
Posição atrás Cilindro comandado manualmente
Cilindro comandado manualmente Posição à frente
Posição atrás Cilindro comandado manualmente e por rolete
Posição atrás Cilindro comandado manualmente e por rolete
Posição à frente Cilindro comandado manualmente e por rolete
Posição atrás Cilindro comandado manualmente e por rolete
Transmissão de movimento • Rodas de atrito; • Engrenagens: • cilíndricas(eixos paralelos); • cónicas(eixos concorrentes); • Torsas(eixos não complanares); • Cremalheira; • Correias; • planas; • trapezóidais; • dentadas. • Correntes; • Cabos.
Pratos com ferodo no intervalo Mola de tracção Bobina START STOP Transmissão de movimento - Embraiagem Quando passa corrente na bobina, a embraiagem fecha. Quando a corrente é interrompida, a embraiagem abre devido à mola de tracção.
Pratos com ferodo no intervalo Mola de tracção Bobina START Quando passa corrente na bobina, a embraiagem fecha. Quando a corrente é interrompida, a embraiagem abre devido à mola de tracção. STOP Transmissão de movimento - Embraiagem
Pratos com ferodo no intervalo Mola de tracção Sensor Interrupção de movimento - Embraiagem Quando o binário resistente do veio mandado ultrapassa o binário de atrito, verifica-se escorregamento, o qual é detectado pelo sensor que desliga o motor