Download
1 / 30
300 likes | 451 Views
SCALE: 1” = 1”. ROBOT DESIGN CONCEPTS. DRAWING:. THE INCOMPARABLE. Humphrey Hu. MVRT. VINTAGE 2005. MANIPULATOR DESIGN. WHAT IS A MANIPULATOR ? ANYTHING THAT A ROBOT CAN USE TO INTERACT WITH THE ENVIRONMENT IS CONSIDER A MANIPULATOR .

E N D
SCALE: 1” = 1” ROBOT DESIGN CONCEPTS DRAWING: THE INCOMPARABLE Humphrey Hu MVRT VINTAGE 2005
MANIPULATOR DESIGN • WHAT IS A MANIPULATOR? • ANYTHING THAT A ROBOT CAN USE TO INTERACT WITH THE ENVIRONMENT IS CONSIDER A MANIPULATOR. • THESE GENERALLY TAKE THE FORM OF ARMS AND OTHER APPENDAGES, BUT ALSO INCLUDE THINGS SUCH AS GIANT RAMPS AND FLIPPERS. • REMEMBER: MORE COMPLEX IS NOT ALWAYS BETTER! A GOOD, PRACTICAL IDEA IS MORE USEFUL THAN A BRILLIANT IDEA THAT BREAKS DOWN EVERY OTHER ROUND.
MANIPULATOR DESIGN • ODDLY ENOUGH, LEAST IMPORTANT COMPONENT: • THOUGH IT WOULD SEEM THE #1 PRIORITY, A ROBOT THAT CAN MOVE ITSELF AND STAY IN 1 PIECE IS MORE VALUABLE THAN ONE THAT CAN WAVE A STICK AROUND. • IMPORTANT FUNCTIONALITY POINTS TO CONSIDER: • PROPERLY ADAPTED TO THE GAME AND GAME STRATEGY • DOES NOT COMPROMISE DRIVING AND STRUCTURE OF ROBOT • MAINTAINABLE AND FEASIBLE
MANIPULATOR DESIGN • MORE THINGS TO CONSIDER: • REMEMBER ABOUT WEIGHT! THOUGH THE MANIPULATOR IS GENERALLY THE HEAVIEST ELEMENT OF A ROBOT, AN EXCEPTIONALLY HEAVY ARM, FOR EXAMPLE, IS MUCH HARDER TO MOVE • USE THE PROPER MOTORS FOR THE JOB! OVERLOADING MOTORS WILL CAUSE THE BREAKERS TO SNAP IN THE MIDDLE OF MOVING AN OBJECTIVE • MANIPULATORS SHOULD EXEMPLIFY “SIMPLE IS BETTER” TO THE FULLEST; IT MAKES THE MECHANICS HAPPIER
MANIPULATOR DESIGN • COMMON MANIPULATOR DESIGN ELEMENTS: • THE MOUNT • ALLOWS MANIPULATOR TO BE SECURELY MOUNTED TO THE CHASSIS • REMEMBER: IF YOURE GOING TO BE DOING UNIT CONVERTING, HERE’S THE PLACE TO DO IT • THE STRUCTURE • THE ‘BONES’ OF THE MANIPULATOR • THE MOTORS WILL GENERALLY BE MOUNTED ON OR POWER THE STRUCTURE
MANIPULATOR DESIGN • COMMON MANIPULATOR DESIGN ELEMENTS: • THE FRAME • “OUTLINE” OF ROBOT. • SHOULD BE MAXIMUM DIMENSIONS. • MUST BE DURABLE; WILL DEFINITELY EXPERIENCE COLLISIONS IN PLAY. • CONSIDER WHERE AND ON WHICH TIER/LEVEL YOUR FRAME WILL HAVE PRESSURE APPLIED
MANIPULATOR DESIGN • COMMON MANIPULATOR DESIGN ELEMENTS: • THE MOTORS • ENABLE THE MANIPULATOR TO MOVE • MOTION CAN BE TRANSFERRED FROM MOTOR TO AXIS OF MOTION WITH BELTS, CHAINS, AND GEARS • SHOULD BE ABLE TO MOVE THE MANIPULATOR EASILY WITHOUT BLOWING UP
MANIPULATOR DESIGN • COMMON MANIPULATOR TYPES: • THE ARM • MOST COMMONLY SEEN WITH A WIDE VARIETY OF USES • ESSENTIALLY CONSISTS OF A PROTRUSION WHICH IS ASSEMBLED ONTO TO THE CHASSIS BY A BASE MOUNT AND MAY CONTAIN OTHER JOINTS, EACH AN AXIS OF ROTATION • CAN BE USED TO MANEUVER OTHER DEVICES, ENABLING THE ARM TO BE VERY VERSATILE DEPENDING ON DESIGN • FRAGILE LIKE MOST MANIPULATORS
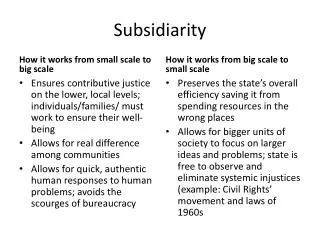
Four Bar - Advantages & Disadvantages • Advantages • Great For Fixed Heights • On/Off Control • Lift Can Be Counter-Balanced or Spring Loaded to Reduce the Load on Actuator • Good candidate for Pnuematic or Screw actuation • Disadvantages • Need Clearance in Front During Lift • Can’t Go Under Obstacles Lower Than Retracted Lift • Got to Watch CG • If Pnuematic, only two positions, Up and Down • Counterbalance if you can Courtesy of Chief Delphi
MANIPULATOR DESIGN • COMMON MANIPULATOR TYPES: • THE ELEVATOR • NOT NEARLY AS COMMON AS THE ARM; HARDER TO DESIGN EFFECTIVELY • GOOD AT EXTENDING OUTWARDS; USUALLY VERTICALLY • MOST OFTEN CONSISTS OF SUPPORT RAILS WHICH HOUSE OTHER SLIDING RAILS, WHICH ARE PULLED UP AND DOWN BY A PULLEY SYSTEM • AN ENTIRE ELEVATOR ASSEMBLY CAN BE TURNED INTO AN ARM TO ALLOW EXTENSION IN A NON VERTICAL DIRECTION
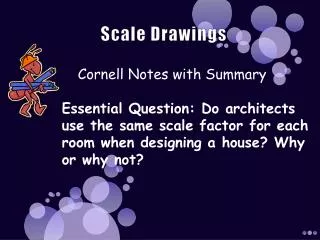
Forklift - Advantages & Disadvantages • Advantages • Can reach higher than you want to go • On/Off Control • Can be rigid • Can be Actuated via Screw, Cable, or Pnuematics, though all involve some cabling • Disadvantages • Stability issues at extreme heights • Can’t Go Under Obstacles Lower Than Retracted Lift Courtesy of Chief Delphi
MANIPULATOR DESIGN • COMMON MANIPULATOR TYPES: • THE RAMP • BASICALLY JUST AN ANGLED SHEET • GOOD FOR DEFENDING AN AREA; ALLOWS OTHER BOTS TO TIP THEMSELVES! • CAN ALSO BE USED TO HAVE ALLIANCE (OR COMPETING) BOTS DRIVE ON TOP OF YOU • USUALLY MUST DEPLOY BY FOLDING DOWN AT BEGINNING OF MATCH DUE TO SIZE LIMITS
MANIPULATOR DESIGN • COMMON MANIPULATOR TYPES: • THE STATIC PROTRUSION • INCLUDES ANYTHING THAT DOES NOT MOVE IN RELATION TO THE ROBOT CHASSIS AS A WHOLE • GENERALLY CONSISTS OF GRABBERS OR OTHER DEVICES MOUNTED ON THE END OF A STICK • CAN ALSO DEPLOY LIKE RAMPS SHOULD SIZE BECOME AN ISSUE
MANIPULATOR DESIGN • COMMON MANIPULATOR SUBTYPES: • THE SIMPLE ARM • A STICK ON AN AXIS OF ROTATION, GENERALLY WITH A DEVICE OR HOOK ON THE END • USUALLY ONLY ROTATES IN 1 DIMENSION • GOOD FOR SIMPLE OBJECT MANIPULATION, SUCH AS BUMPING OR MOVING AROUND • SIMPLE AND EASY TO FIX AS ARMS GO
MANIPULATOR DESIGN • COMMON MANIPULATOR SUBTYPES: • THE 2D COMPLEX ARM • A SIMPLE ARM WITH MORE JOINTS, HOWEVER ALL ROTATING IN THE SAME DIRECTION • USEFUL FOR MORE PRECISION OBJECT MANIPULATING OR NON-LINEAR OBJECT MOTION • MORE DIFFICULT TO MAINTAIN AND MECHANIZE THAN A SIMPLE ARM • ALSO MORE FRAGILE AND HEAVIER
MANIPULATOR DESIGN • COMMON MANIPULATOR SUBTYPES: • THE 3D COMPLEX (ARTICULATED) ARM • A SIMPLE ARM WITH MORE JOINTS, HOWEVER ROTATING IN DIFFERENT DIRECTIONS • USEFUL FOR MORE PRECISION OBJECT MANIPULATING OR NON-LINEAR OBJECT MOTION WITHOUT HAVING TO ROTATE THE WHOLE ROBOT • MUCH MORE DIFFICULT TO MAINTAIN AND MECHANIZE THAN A SIMPLE ARM • ALSO MORE FRAGILE, HEAVIER, AND HARD TO DESIGN
MANIPULATOR DESIGN • COMMON MANIPULATOR SUBTYPES: • THE SIMPLE PINCER ARMS • 2 SIMPLE ARMS MOUNTED TO ROTATE INTO EACH OTHER IN A ‘PINCER’ ACTION • USEFUL FOR GRABBING OBJECTIVES WHEN ACCURACY IS NOT AN ISSUE • SHOULD FOLD INTO CHASSIS NICELY IN ORDER TO NOT CONFLICT WITH MAXIMUM DIMENSIONS
MANIPULATOR DESIGN • COMMON MANIPULATOR SUBTYPES: • THE SINGLE-STAGE ELEVATOR • AN ELEVATOR WITH ONE SET OF SLIDING RAILS • USUALLY HEAVIER THAN ARMS • GENERALLY HARDER TO TUNE PROPERLY AND PREVENT BINDING • BINDING IS WHEN THE SLIDING RAILS IN AN ELEVATOR ARE NOT PROPERLY ALIGNED AND ‘BIND’ TO THE RAILS
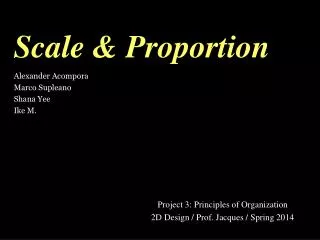
MANIPULATOR DESIGN • COMMON MANIPULATOR SUBTYPES: • THE MULTIPLE-STAGE ELEVATOR • AN ELEVATOR WITH MORE SETS OF SLIDING RAILS • ADDS WEIGHT BUT ALSO ADDS TO MAXIMUM EXTENDED HEIGHT AND STRENGTH • GENERALLY HARDER TO MACHINE AND ASSEMBLE DUE TO MULTIPLE PULLEYS AND CABLE TENSION REQUIREMENTS
Rails Stages
MANIPULATOR DESIGN • COMMON MANIPULATOR SUBTYPES: • THE STATIC RAMP • NOT A TRUE MANIPULATOR IN THE SENSE THAT IT IS BUILT INTO THE CHASSIS • EITHER HAS HIGHER INCLINE OR OBSTRUCTS INTERNAL SPACE • MAY ALLOW FOR A FURTHER MANIPULATOR TO BE MOUNTED ON TOP OF CHASSIS
Generally the ramps are designed at an angle less than 45 degrees
MANIPULATOR DESIGN • COMMON MANIPULATOR SUBTYPES: • THE DEPLOYABLE RAMP • DEPLOYS FROM A VERTICAL POSITION TO ALLOW GREATER RAMP AREA WHILE NOT OBSTRUCTING CHASSIS SPACE • INCLINE CONSTRAINED BY MAXIMUM HEIGHT OF ROBOT • DEPLOYMENT SHOULD BE SIMPLE AND NOT REQUIRE MORE THAN 1 MOTOR, IF ANY
MANIPULATOR DESIGN • COMMON MANIPULATOR SUBTYPES: • THE STATIC CLAW • CONSISTS OF A CLAW MOUNTED ON THE END OF A CHASSIS PROTRUSION • USEFUL FOR GRABBING OBJECTIVE COMPONENTS, SUCH AS PVC PIPING OR BARS • DIFFERENT TYPE OF CLAWS FOR DIFFERENT OBJECTS • MAY CAUSE CHASSIS TO BE LESS THAN MAXIMUM DIMENSIONS IF NOT DEPLOYABLE
MANIPULATOR DESIGN • COMMON MANIPULATOR SUBTYPES: • THE STATIC BUMPER • CONSISTS OF A BUMPER OR PROTRUSION ON THE CHASSIS • USED FOR ‘BUMPING’ OBJECTIVES OR AS A DEFENSIVE COMPONENT • THINK OF A WALL ON WHEELS, SHOULD THE NEED ARISE