Download
1 / 39
540 likes | 851 Views
Linear Time Temporal Logic Every state has unique time successor Infinite sequences. Computation Tree Logic A state may have multiple time successors Infinite tree. Temporal Logics. Express reactive properties (order of events in time)

E N D
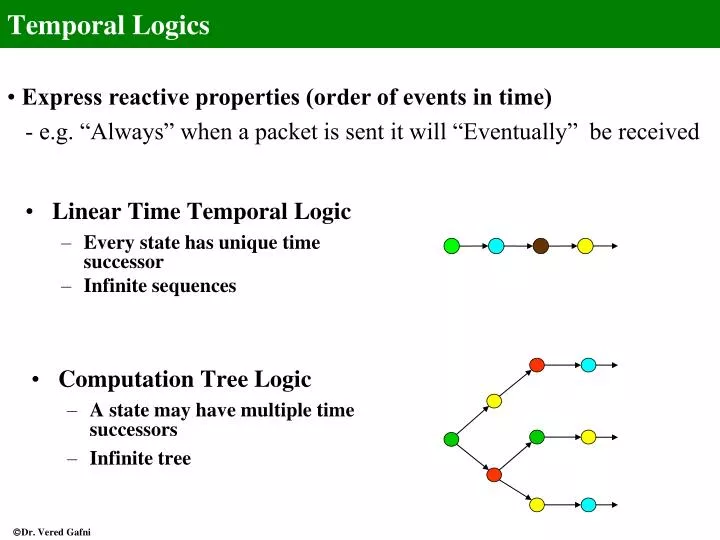
Linear Time Temporal Logic Every state has unique time successor Infinite sequences Computation Tree Logic A state may have multiple time successors Infinite tree Temporal Logics • Express reactive properties (order of events in time) • - e.g. “Always” when a packet is sent it will “Eventually” be received Dr. Vered Gafni
Propositional Linear Temporal Logic (LTL) • Extension of propositional logic with temporal operators. • Syntax - Atomic propositions: a,b,c,…, and constants tt, ff - For every formulae p,q p, pq, Op, p,p,pUq next until always eventually • Examples: • pOp, (pOp), (XisZero), (close)U(stop) Dr. Vered Gafni
LTL Semantics Semantic domain of LTL formula [P]: , where = 2P Given , =012…, i2P (j=jj+1j+2…, j0) is a model of iff 0 Dr. Vered Gafni
LTL Examples I Op: 1p p: k0. kp p: k0kp Dr. Vered Gafni
LTL Examples II pUq: k0. 0ik ip and kq (pUq): j0. jpUq, i.e. kj. jik ip and kq Dr. Vered Gafni
LTL interpretation over Transition Systems Oq p u rUs s O(rqUs) Dr. Vered Gafni
Identities • q ttUq • ttUq iff k0 s.t. 0ik itt and kq • iff k0 s.t. kq • iff q • qq (exercise). • Hence, O, U form a compact set of temporal operators Dr. Vered Gafni
Common implications (tautologies) • p q(p q) • p q(p q) • p p • Op p • p p • p p • p p • p p • q pUq • q (pUq) idempotency Dr. Vered Gafni
LTL regular language • Given [P], define =2P • By definition for every model of , • L(), the set of all models of , is an -regular language proof: by induction on the structure of Is the converse: regular language LTL, true ? Dr. Vered Gafni
Properties Classification Safety: - “something bad never happens” (actually invariants) - can beproved false within a finite prefix of a run. -- traffic and pedestrian lights never show green simultaneously (T_Green P_Green) – no deadlock (action1 … actionn) Liveness: - “something good will happen” can beproved false only along an infinite run. -- program termination Pstart Pterminates Dr. Vered Gafni
Some Typical Property Patterns p q def(pq) Response p qinitial p is followed by q (pq) responsiveness (p q)every p is followed by q Recurrence p infinitely often p eventually always Precedence pU(qUr) -- order of occurrence is preserved (pUq)Ur -- order of occurrence ? (pUq)p -- weak until pWq -- p cannot occur before q p q pWqdef(pUq)p Dr. Vered Gafni
Interval Properties • P is true during [Q,R] : ((Q R) PU(PR) • P occurs within (Q,R): • ((Q R OR )R) (R)U(O(P R))) Dr. Vered Gafni
Example: Chained Until Between the time an elevator is called at a floor and the time it opens its doors at that floor the elevator can pass that floor at most twice. Let Move AtFloor Stop AtFloor DoorOpen Open AtFloor DoorOpen Then, ((call Open) (Move U (Open (Stop U (Open (Move U (Open (Stop U (Open (Move U Open)))))))))) Dr. Vered Gafni
System Formalization • Build system interface • Input: events, discrete (finite domain) variables • Output: variables, actions (events) • Specify system assumptions • Specify system requirements {Assumptions} {Program} {Requirements} LTL formulae over system interface Dr. Vered Gafni
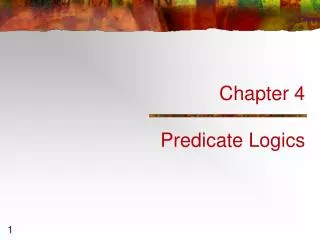
Water Level Control (WLC) valve Water-level sensor The valve should be open as long as water level L, and close as long as water level H. An open valve, stays open until level H, similarly, a closed valve stays closed until level L. At startup, water level H. H L Dr. Vered Gafni
WLC: Ontology Controller Valve position command Water-level sensor H valve L Input: WaterLevel: { low, inter, high } Output: ValvePosition: { closed, opened } Dr. Vered Gafni
WLC: Interface Propositional Representation • Interpreted by logic, hence use Booleans • WaterLevel : { low, inter, high } • Conditions: LowLevel, InterLevel, HighLevel • (LowLevel InterLevel HighLevel) • LowLevel (InterLevel HighLevel) • InterLevel (LowLevel HighLevel) • HighLevel (InterLevel LowLevel) • ValvePosition: { ValveClosed, ValveOpened } • (ValveClosed ValveOpened) • ValveClosed (ValveOpened) • In practice, enumeration types are used and proof systems • automatically deploy them into Booleans with the proper • axioms (assumptions). Ontological Assumptions Dr. Vered Gafni
WLC Assumptions • Given properties, relevant to the system implementation • External environment (controlled process) behavior • -- At startup water level < H. • ¬HighLevel • - Open valve will eventually raise water to high level • (ValveOpened HighLevel) • (ValveClosed HighLevel) • Design dependent (sensors, actuators, processor, etc.) • Ontological definitions, and abstract variables • Platform Assumptions: • - Change of valve state occurs at an interval, not a time instant. • - Container volume, and rates of water inlet and outlet flow. Dr. Vered Gafni
WLC: Requirements • The valve is open as long as water level L, and close as long as water level H. (HighLevel ValveClosed) (LowLevel ValveOpened) • An open valve, stays open until level H, similarly, a closed valve stays closed until level L ValveOpened ValveOpened W HighLevel ValveClosed ValveClosed W LowLevel Dr. Vered Gafni
Railroad Crossing Dr. Vered Gafni
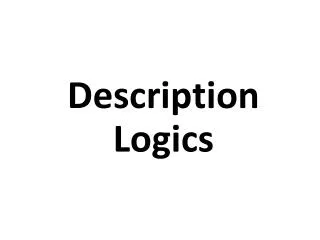
Case Study: Railroad Crossing Design a controller that handles the passage of a train in a one-wayrailroad crossing. The plant consists of a pair of reliable sensors that indicate train entering and exiting the crossing region (XR), a signal for entering trains, and a gate for blocking passage of cars from a side road. We assume that at startup no train enters, is already in, or exits XR. The minimal delay between successive trains is 40 seconds, and incoming trains do not traverse the signal as long as it shows ``stop''. It takes a train 6 seconds to arrive at the signal, and further 15-25 seconds to traverse the crossing (depending onwhether the train had to stop at the signal, or not). It is required that: • The gate is closed when a train moves in the gate area (between the signal and the exit point). • The gate is open whenever the crossing is empty for more than 10 seconds. • Every train that arrives at the signal is allowed to continue beyond the signal within 10 seconds. • No train enters XR while another train is still there. Dr. Vered Gafni
Railroad Crossing opened when no train more than 10 sec Train stoped for no more than 10 sec No less than 40 sec 6sec (15-25)sec Initially empty closed when train in No more than 1 train in XR Dr. Vered Gafni
The Railroad Crossing Ontology Events • Tin - Train enters XR • Tout - Train exits XR Operations • Up - Raising the gate up (opening) • Down - Lowering the gate (closing) • Stop - Signal turned to show stop • Pass - Signal turned to show pass • Operation K: • @Kinitiation event • K!termination event. • Synchronous K: @K, K! occur simultaneously, denoted by K Dr. Vered Gafni
Assumptions • At startup no train enters, or exits XR. (Tin Tout) • At startup no train is in XR. (Tout)W(Tin Tout) ? • 40 seconds minimal delay between trains? • It takes a train 6 seconds to arrive at the signal? • It takes a train 15 to 25 seconds to traverse gate area ? Dr. Vered Gafni
Inserting Time Model into LTL • Adopt discrete time model (N). • Detrmine time unit. • States are fixed rate snapshots of the system. s0 s1 s2 s3 s4 s5 0 1 2 3 4 5 Next State = Next time instant Dr. Vered Gafni
Expressing Durations in LTL This approach makes the satisfaibility problem EXPSPACE-hard Op- p holds after one time unit. OOp- p holds after two time units. Onp- p holds after n time units (O0p=p ). Om,np def Omp Om+1p … Onp -- p holds continuously in the interval [m,n] Om,np def Omp Om+1p … Onp -- p holds sometimes in the interval [m,n] Dr. Vered Gafni
Assertions (revised) • At startup no train enters, is in, or exits XR. (Tin Tout) “is in XR” ? • 40 seconds minimal delay between trains. Tin O1,39Tin • It takes a train 6 seconds to arrive at the signal. Introduce abstract variable AtSignal - the train arrives at the signal - defined by: Tin O6(AtSignal) • It takes a train 15 to 25 seconds to traverse gate area ? We need to characterize the instant a train enters the critical section ! (either immediately, if signal shows pass, or after being stopped when signal turns to show pass Dr. Vered Gafni
Conditions (Abstract Variables) Represented by event that occurs iff the conditionis true • ShowStop- the signal shows “stop” (abstract variable). (Stop! ShowStop) (O(Stop!) (ShowStop O(@Pass))) O(ShowStop) • Any operation K, let • @K initiation event • K! termination event of its execution. Dr. Vered Gafni
Entering the Crossing • EnterGR – train passes the signal (EnterGR (AtSignalTwait)) O(EnterGR)O(AtSignalTwait)(TwaitO(Twait)) • Twait - train waiting at signal ((AtSignal ShowStop) Twait) (O(AtSignal ShowStop) (Twait O(ShowStop))) O(Twait) • ShowStop - the signal shows “stop”. (Stop! ShowStop) (O(Stop!) (ShowStop O(@Pass))) O(ShowStop) Dr. Vered Gafni
Past & Since Operators Past • - occurred in the previous step - j iffj1 and j-1 (0) Now, ShowStop can be defined as: (Stop! (ShowStop @Pass)) ShowStop Since • S - occurred in the past and since then - j S iff0kj s.t. k and ki ji Now, ShowStop can be defined as: (@Pass)S(Stop!) ShowStop Dr. Vered Gafni
EnterGr rewritten • EnterGR – train passes the signal EnterGR (AtSignal ShowPass) (Twait Pass) • Twait - train waiting at signal Twait (ShowStop)S(AtSignal ShowStop) • ShowStop- the signal shows “stop”. ShowStop (@Pass)S(Stop!) • ShowPass- the signal shows “pass”. ShowPass (@Stop)S(Pass!) Dr. Vered Gafni
Assertions (revised) • At startup no train is inXR ? • 40 seconds minimal delay between trains. • Tin O1,39Tin • It takes a train 6 seconds to arrive at the signal. • Tin O6(AtSignal) • It takes a train 15 to 25 seconds to traverse gate • area. • EnterGR O15,25Tout Dr. Vered Gafni
Requirements • Every train that arrives at the signal is allowed to continue beyond the signalwithin 10 seconds. AtSignal O0,10(Twait) • No train enters XR while another train is still there. Tin O(TinUTout) • The gate is closed when a train traverses GR. EnterGR ClosedUTout • Abstract variable Closed - the gate is closed (assumption) Closed (@Up)S(Down!) Dr. Vered Gafni
Requirements (cont.) • The gate is open whenever the crossing is empty for more than 10 seconds. Empty_10s Open Empty_10s - XR is empty at least 10 seconds. Empty_10s (Tin)S(Bempty_10s) Bempty_10s - XR is empty 10 seconds (exactly) (10(Startup Tout) 0,10(Tin)) Bempty_10s Open - the gate is open Open (@Down)S(Up!) • Add ontology assumption: • Startup OStartup, or Startup true Assumptions Dr. Vered Gafni
About Abstract Variables • Tin O6(AtSignal)AtSignalcan be replaced by6(Tin) • (Stop! ShowStop) (O(Stop) (ShowStop O(@Pass))) O(ShowStop) (Stop! (ShowStop @Pass)) ShowStop (@Pass)S(Stop!) ShowStop Dr. Vered Gafni
Design Assumptions Specify design constraints that are not explicitly expressed in the controller program (usually time constraints), but are essential in an attempt to prove its correctness. • We may want to assume that signal operations are actions (synchronous operations): @Stop Stop!, @Pass Pass!, Hence, we use Stop, Pass as initiated events. • We need specify deadline (causality) constraints for gate operations: (@Up (@Down)U(Up!) O0,10(Up!))O0,10(@Down)) (@Down (@UpU(Down!) O0,10(Down!)) O0,10(Up!)) Dr. Vered Gafni
Counting in LTL (the N Train Assumption) Goal: Direct expression of empty and busy XR Ground assumption: The number of exits does not exceed thenumber of entries. Problem: LTL is not expressive enough to allow counting. Possible solution: Assume that there are at most N trains in the system (makes sense in real world). Dr. Vered Gafni
N Train Assumption Say N=2: Tcr0, Tcr1, Tcr2 indicate 0,1,2 trains in XR then: • (Tcr0 Tcr1 Tcr2) • Tcr0 (Tcr1 Tcr2) • Tcr1 (Tcr0 Tcr2) • Tcr2 (Tcr1 Tcr0) • Tcr0 Tout • Tcr0 Tin O(Tcr0) • Tcr0 Tin O(Tcr1) • Tcr1 Tin Tout O(Tcr2) • Tcr1 Tout Tin O(Tcr0) • Tcr1 ((Tout Tin) (Tout Tin)) O(Tcr1) • Tcr2 Tout Tin O(Tcr1) • Tcr2 Tout Tin -- here we make the restriction toN=2 • Tcr2 (Tout (Tout Tin)) O(Tcr2) These are axioms that define the meaning of Tcr0,Tcr1,Tcr2 Dr. Vered Gafni
Properties Specification - At startup no train is inXR Tcr0 - No train enters XR while another train is still there. (Tcr2) Dr. Vered Gafni